



VxWowks�����^��
һ����f�����е�̎������(zh��)����ͬ��߉���E��ʼ���ͼ��dVxWorks����һЩ̎�������ܕ���һЩ����IJ��E��������һЩ�t�������^һЩ���E����������Ҫ�M(j��n)�����²��E���磺��ʼ��̎���������ڴ惦�����ض�λ���ṩһ�δ��a������߀��һЩ�����Թ�̎������늻��؆��r�\�С��@�δ��a�O(sh��)��̎�����Ġ�B(t��i)����ʼ���惦���ʹ惦����ַ���P(gu��n)�Д�ѿ��ƙ�(qu��n)���o���Ӵ��a��bootstrapping code����
1. ̎������������ROM����ڵ�ַ���O(sh��)�à�B(t��i)�ֲ���(chu��ng)��һ�����ї���DUMMY stack����
2. ����C�������ڵ�ַ������(j��)���ї��еą���(sh��)�Q���Ƿ������(n��i)��RAM�������䆢�ӣ�cold start���t���㣩���ٰ�ROM�ε�ʣ�ಿ�ֿ�ؐ��RAM�����ROM���a�lj��s�ģ�߀Ҫ�≺����
3. ̎��������RAM����ڵ�ַ��bootConfig.c����ʹcache�oЧ������bss�Σ���ʼ�����������M(j��n)�а弉��ʼ����
4. ���Ӷ��΄�(w��)��(n��i)�ˡ�
VxWorks��boot ROM��������һ�������đ�(y��ng)�á��_�l(f��)�߿�������ͨ�^�W(w��ng)�j(lu��)����һ��VxWorksӳ�͑�(y��ng)�ô��a�B�ӡ�
1 VxWorks��������
romInit����������romStart����������sysInit����������initVectBaseSet����������sysHwInit����������usrKernelInit���� ������kernelInit����������usrRoot����
2 �ļ��ͳ����f��
romInit.S�� romInit����
�P(gu��n)�Д࣬�ц�����ͣ�cold/warm���뗣������cache������romStart����ڡ�
bootInit.C��romStart����
��ROM���a�͔�(sh��)��(j��)�ο�ؐ���ض�λ��RAM������RAM��δ�ò��֣���Ҫ��ԒҪ�M(j��n)�н≺�s��Ȼ������sysInir��������ڵ�ַ��
��ؐ���^�����£�
A�����a�β����v����ROM�У�Ҫ��ؐ���a�κ͔�(sh��)��(j��)�Σ�
B������a�����v����ROM�еģ��tֻ��ؐ��(sh��)��(j��)�Σ�
C��δ�õă�(n��i)�����㣻
D����Ҫ�r��Ҫ�M(j��n)�н≺�s��
sysALib.S��sysInit����
sysInit������VxWorksӳ�����ڵ�ַ����ʼ��ַ��RAM-LOW-ADR���x���������P(gu��n)�Д࣬ʹcache�oЧ����ʼ��̎�����ļĴ�����ȱʡֵ��ʹtracing�oЧ������Д�Ĵ�������ʼ��usrInit�����Ķї�������usrInit������
ע�⣬��sysInit�����б�����³�ʼ����romInit������������Ӳ����ʼ����
usrConfig.C and bootConfig.C��usrInit����
����VxWorks�\�еĵ�һ��C���a����supervisor mode�м�����P(gu��n)�Д࣬�惦���P(gu��n)������ͣ�boot type������Ϣ����VxWorks��(n��i)���\��ǰ�M(j��n)�б�Ҫ�ij�ʼ����
A����ʼ��cache��ģʽ���O(sh��)�Þ鰲ȫ��B(t��i)����usrInit�����Y(ji��)���rʹcache��Ч��
B������ϵ�y(t��ng)bss�Σ�
C����ʼ���Д����������{(di��o)��VectBaseSet������exeVectInit������
D����ʼ��ϵ�y(t��ng)Ӳ������ʹ֮�oЧ��Quiescent State�����{(di��o)��sysHwInit�������@��һ���cӲ�����P(gu��n)���^�̣����҂�Ҫᘌ���ͬ��Ŀ��(bi��o)���M(j��n)���ĵ���Ҫ���֣������漰�����ڣ��W(w��ng)�ڵij�ʼ����CONSOLE�����õȣ�
E���{(di��o)��usrKernelInit��������ʹ��cache��
F���{(di��o)��kernelInit��������(chu��ng)��usrRoot������
usrKernel.C��kernelInit����
��ʼ����(n��i)�˿��x�M����kernel facility����
kernelLib.C��usrKernelInit����
��ʼ�����΄�(w��)�h(hu��n)����
�{(di��o)��intLockLevelSet������ʹ�r�gƬ��round-robin����ʽ�oЧ���ڃ�(n��i)��ĸ߶˄�(chu��ng)���Д�ї���ROOT�ї���TCB����(chu��ng)��usrRoot�������Д�usrInit�������\�У�Ȼ����_�Д࣬ע��Ҫ����Д�Ĵ�����
usrConfig.C and bootConfig.C��usrRoot����
��ʼ��I/Oϵ�y(t��ng)���(q��)�������O(sh��)�䣨��configAll.h��config.h��ָ������
3 �����б�
����Ӳ����ʼ��������¿ɰ��±�����ʽ�M(j��n)�У�
�� ��(sh��) �� ��(sh��) �� �� �� �� �� ��
sysInit() (a)�iס�Дࣻ(b)���þ��_��
(c)��ȱʡֵ��ʼ��ϵ�y(t��ng)�Д�����Hi960);
(d)��ȱʡֵ��ʼ��ϵ�y(t��ng)�e�`�����Hi960);
(e)��ʼ��̎�����Ĵ�����һȱʡֵ;
(f)ʹ����ʧЧ��(g)������Б����Дࣻ
(h)����usrInit()��ָ��������͡� sysALib.s
usrInit() (a)��bss�x�㣻
(b)����bootType��sysStartType;
(c)�{(di��o)��excVecInit(),��ʼ������ϵ�y(t��ng)��ȱʡ�Д�������
(d)�����{(di��o)��sysHwInit(), usrKernelInit(),kernelInit(). usrConfig.c
usrKernelInit() �����{(di��o)��classLibInit(),taskLibInit(),taskHookInit(),semBLibInit(),semMLibInit(),semCLibInit(),semOLibInit(),wdLibInit(),msgQLibInit(),qInit(),workQInit() usrKernel.c
kernelInit() ��ʼ�������Ӄ�(n��i)�ˡ�
(a)����intLockLevelSet();
(b)�ă�(n��i)���픲���(chu��ng)�����ї���TCB��
(c)�{(di��o)��taskInit(),taskActivate(),����usrRoot();
(d)�{(di��o)��usrRoot(). kernelLib.c
usrRoot() ��ʼ��I/Oϵ�y(t��ng)���(q��)�������O(sh��)�䣨��configAll.h��config.h��ָ����
(a)�{(di��o)��sysClkConnect(),sysClkRateSet(),
iosInit(),[ttyDrv()];
(b)��ʼ��excInit(),logInit(),sigInit().
(c)��ʼ���ܵ�,pipeDrv();
(d)stdioInit(),mathSoftInit()��mathHardInit()
(e)wdbConfig():���ò���ʼ��Ŀ��(bi��o)����C(j��) usrConfig.c
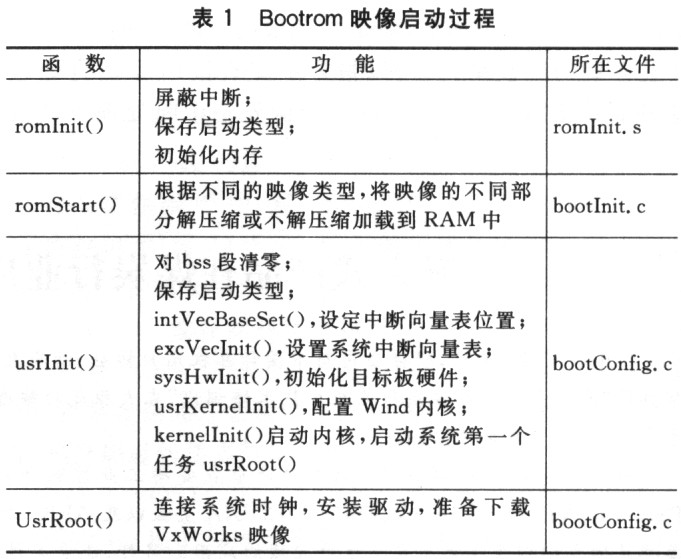
�ڴ����(sh��)Ŀ��(bi��o)��İ弉֧�ְ��У�VxWorks������c�Ƀɂ�����(sh��)��romInit()��romStart()����ɣ�����sysInit()�����w����ROM��VxWorks�ij�ʼ���^�����±���ʾ��
����(sh��) ����(sh��)���� �����ļ�
1.romInit()
2.romStart()
3.usrInit()
4.usrKernelInit()
5.kernelInit()
6.usrRoot()
7.Application routine (a)��ֹ�Дࣻ
(b)���憢����ͣ�
(c)Ӳ����ʼ����
(d)�{(di��o)��romStart();
(a)����(sh��)��(j��)�Ώ�ROM��ؐ��RAM�����(n��i)�棻
(b)�����a�Ώ�ROM��ؐ��RAM���б�Ҫ��Ԓ�� ���s��
(c)�{(di��o)��usrInit();
��ʼ������
�������(y��ng)�������ļ������x������(y��ng)����(sh��)���{(di��o)��
��ʼ�������Ӄ�(n��i)��
��ʼ��I/Oϵ�y(t��ng)���(q��)��������(chu��ng)���O(sh��)��
��(y��ng)����a romInit.s
bootInit.c
usrConfig.c
usrKernel.c
kernelLib.c
usrConfig.c
Application source file
BSP�ĽY(ji��)��(g��u)
BSP��һϵ���ļ��ļ��ϣ��@Щ�ļ������ܴ��¿ɷ֞��������֣�һ�Dz���ϵ�y(t��ng)�d�w��Ӳ����ʼ���ļ������Dz���ϵ�y(t��ng)��ʼ���ļ�����������BSPĿ��(bi��o)���a����Ĺ����ļ�������N���g�B���ļ��ȡ�
BSP���ļ���(g��u)�����£�
1��Ӳ����ʼ���ļ���̎������ʼ������
2������ϵ�y(t��ng)��ʼ���ļ�������^�ļ����(q��)�ӳ�����ϵ�y(t��ng)��(n��i)�˳�ʼ������(chu��ng)�����΄�(w��)�h(hu��n)������
3�������ļ������make�ļ�������ϵ�y(t��ng)����(d��o)�ļ��Ĺ��ߡ�
BSP����
1���ΰ�Ӳ����ʼ������Ҫ��CPU�ij�ʼ����������ܛ��ϵ�y(t��ng)�ṩ�ӵ�Ӳ��]]>
1 ��B
S3C4510B�����ǹ�˾�Ƴ���ᘌ�Ƕ��ʽ��(y��ng)�õ�16/32 λǶ��ʽ̎������ԓ������������̫�W(w��ng)ͨ��ϵ�y(t��ng)�ļ�������·�������O(sh��)Ӌ�����еͳɱ������ܵ����c, S3C4510B�Ѓ�(n��i)�����O(sh��)Ӌ��16/32λARM7TDMI̎����, ���Ԉ�(zh��)��32λ��ARMָ�Ҳ�Ɉ�(zh��)��16λ��THUMBָ��, �������˶�N�����������Ҫ��
�� �r��l��50MHz
�� ��(n��i)��/IO늉�3.3V
�� 8KB��Cache/SRAM
�� һ��10/100Mbps ��̫�W(w��ng)��������MII�ӿ�
�� �ɂ�HDLCͨ����ÿ��ͨ����֧��10Mbps
�� �ɂ�UARTͨ��
�� �ɂ�DMAͨ��
�� �ɂ�32λ���r/Ӌ��(sh��)��
�� 18���ɾ���I/O��
�� �Д��������֧��21���Д�Դ������4���ⲿ�Д�
�� ֧��SDRAM��EDO DRAM��SRAM��F(xi��n)lash��
�� ���ДU(ku��)չ�ⲿ����
�� JTAG�ӿڣ�֧��ܛ���_�l(f��) ��Ӳ���{(di��o)ԇ
S3C4510B֧��Ŀǰ���õ�Ƕ��ʽ����ϵ�y(t��ng)����VxWorks��pSoS��ucLinux�ȣ����Č���Ҫ��BVxWorks����ϵ�y(t��ng)�µ�ܛ���_�l(f��)��
ARM7TDMI��ARM����ͨ�õ�һ��32λ̎����������Ҫ���Ñ��ṩ�˸����ܡ��̓r���Q������
ARM7TDMI����������ˮ����32λRISC̎������̎�����Y(ji��)��(g��u)���T���Z����Load/Store��ԓCPU���ЃɷNָ�����ARM��Thumbָ���ARMָ���32λ������������CPU������ܣ���Thumbָ��t��16λָ���
ARM7TDMI��(n��i)�˷��K�D��D1��ʾ��
2 ϵ�y(t��ng)Ӳ���D
ԓϵ�y(t��ng)��Ҫ��S3C4510B����ģ������������̫�W(w��ng)����SDRAM��FLASH��UART�Լ�HDLC�ȡ��D2����S3C4510B����ĵ���Сϵ�y(t��ng)�O(sh��)Ӌ�D��
SDRAM�x��HY57V653220��8Mbyte������ƬF(xi��n)LASH�քe��AM29F040�����bootrom����T28F160BT�������ļ�ϵ�y(t��ng)�ã���
3 VxWorks����ϵ�y(t��ng)��BSP��(g��u)��
����ɰ��ϻ���Ӳ���Ĝyԇ�������Ҿ��_ʼ��vxWorks����ϵ�y(t��ng)��BSP�M(j��n)���_�l(f��)���_�l(f��)ǰ��Ҫ��һЩ��(zh��n)�乤�������(zh��n)���_�l(f��)���ߵȡ�
�� �_�l(f��)�����õ���Tornado2.2 for ARM��
�� �����Y����BSP Kit��S3C4510B DataSheet��
�� ����Tornado2.2 for ARM���Ԏ���wrSBCArm7 BSP��
�� ����������þ�������
ͨ�����_�l(f��)BSP�ĕr���҂���Ҫ��Tornadoԭ��BSPĿ�����һ���c�҂����õ�̎������ͬ��������cBSP���P(gu��n)���ļ��У�romInit.s��sysAlib.s��bootInit.c��bootConfig.c��sysLib.c��config.h��configNet.h��makefile�Լ��c�҂�Ӳ�����P(gu��n)�ģ��紮��sysSerial.c�ȡ�����ƪ�����ޣ����w���ļ������ڴ˾Ͳ��f�ˡ�������Ҫ����(j��)S3C4510B���U��һ��BSP�_�l(f��)���E��
��1����ؐBSP
��wrSBCArm7 BSP��ؐһ�ݲ�������4510BSP�������Ĺ���������ԓĿ��µ��ļ����Ķ��õ��Լ���BSP��
��2����MakeFile�ļ�
��4510BSPĿ��µ�makefile�ļ�����������
TARGET_DIR = 4510BSP # changed by caiyang
VENDOR = CAI # changed by caiyang
BOARD = MyArmBoard # changed by caiyang
ROM_TEXT_ADRS = 01000000 # ROM entry address
ROM_WARM_ADRS = 01000004 # ROM warm entry address
ROM_SIZE = 00080000 # number of bytes of ROM space
RAM_LOW_ADRS = 00006000 # RAM text/data address (bootrom)
RAM_HIGH_ADRS = 00486000 # RAM text/data address (bootrom)
MACH_EXTRA =
ע�⣺ROM_TEXT_ADRS��BOOT ROM����ڵ�ַ���������(sh��)����f���@����ROM��ַ�^(q��)����ַ��Ȼ��Ҳ�е�Ӳ������ʹ��ROM��ʼ��һ���ֵ�ַ�^(q��)�����(f��)λ�����������Ҫ����(j��)���O(sh��)��ƫ�����������ĵ�ַ���@��ƫ������CPU�Y(ji��)��(g��u)������
ROM_WARM_ADRS��BOOT ROM�ᆢ�����
]]>1 BSP����
BSPͨ����ָᘌ����w��Ӳ��ƽ�_���Ñ��������Ć��Ӵ��a�Ͳ����O(sh��)���(q��)�ӳ���ļ��ϡ��������F(xi��n)�Ĺ��ܰ�����ʼ�����(q��)�Ӳ����O(sh��)�䡣�������BSP�H��Ҫ֧��̎������(f��)λ����ʼ�����(q��)�Ӵ��ںͱ�Ҫ�ĕr�̎����BSP�������ڲ���ϵ�y(t��ng)���Եģ���ͬ�IJ���ϵ�y(t��ng)����(y��ng)��ͬ��ʽ��BSP����ˣ��ڌ�B(t��i)SP�rһ��Ҫ����Ҫ��IJ���ϵ�y(t��ng)��BSP�Ķ��x��ʽ�팑����VxWorksϵ�y(t��ng)�У�BSP�ǽ��ڵ�Ӳ���h(hu��n)����VxWorks֮�g��һ��ܛ���ӿڣ�������Ҫ������ϵ�y(t��ng)��늺��ʼ��Ŀ��(bi��o)�C(j��)Ӳ����VxWorks�����ṩ����Ӳ���(q��)�ӳ���BSP��VxWorksϵ�y(t��ng)�еČӴ��P(gu��n)ϵ��D1��ʾ��

BSP����N�忨��Ӳ�������ṩ�˽y(t��ng)һ��ܛ���ӿڣ�����Ӳ����ʼ�����Д�IJ���̎����Ӳ���r犺Ͷ��r����������(n��i)���ַӳ�䣬�Լ���(n��i)�����ȡ�ÿ��BSP߀����һ��ROM���ӻ��������әC(j��)�ơ�
2 VxWorks������(d��o)�^��
�ھ���B(t��i)SP֮ǰ������Ҫ�˽�����ϵ�y(t��ng)�Ć����^�̡�VxWorks��ӳ���ɴ��a�Ρ���(sh��)��(j��)�κ�BSS��3���ֽM�ɡ�VxWotks��(n��i)�˿��Է֞�3�N���ɼ��d���ӳ����ROM��VxWorksӳ���RoM�v����ӳ���@3�N��͵�ӳ��M���Dz�һ�ӵģ���ˆ����^�������^(q��)�e��
�ɼ��dӳ�����VxWorks��Boot ROM�ɲ��փ�(n��i)�ݣ��ɲ����Ǫ�����(chu��ng)���ġ����ȣ���ϵ�y(t��ng)����(d��o)���a��ROM����(d��o)����ᵽRAM_HIGH_ADRS��Ȼ��ROM����(d��o)�����_ʼ�\�У���VxWorksӳ����d��RAM_LOW_ADRS��֮�����D(zhu��n)��VxWorksӳ���b���c��
����ROM��VxWorksӳ����BSP��ʼ���r������lmage��ȫ�ᵽRAM�Ј�(zh��)�У��������a�κ͔�(sh��)��(j��)�Ρ��ڿ�ؐ��(zh��)���ꮅ��ϵ�y(t��ng)���ƙ�(qu��n)�D(zhu��n)�ƽoRAM��VxWorksӳ��ij�ʼ�����a��
ROM�v����ӳ��ֻ�nj�ROM��VxWorksӳ��Ĕ�(sh��)��(j��)�κ�BSS�ο�ؐ��RAM�У���ɺ�ϵ�y(t��ng)���ƙ�(qu��n)�D(zhu��n)�ƽoROM��Flash��VxWorksӳ��ij�ʼ�����a�����a������ROM�в���ROM���\�С���ROM���\�е�VxWorksӳ����Ҫ����˹�(ji��)ʡRAM���g�������IJ����t���\���ٶ�����
�D2�͈D3�քe�����d�ͺ�ROM��VxWorksӳ��ij�ʼ�����̡�

������ROM��VxWorks��(n��i)�ˆ������̞������f�����ļ������ã�
romlnit()���憢����ͣ������Дࣻ��ʼ����(n��i)��ͼĴ���������Cache����ʼ��CPU�����ї�ָᘶ�λ�ڱ���ؐBoot ROMӳ����RAM�ĵ�ַ������romStart()��
roraStart()����(j��)��ͬ��ӳ����͌�VxWorksӳ��IJ�ͬ���ֽ≺�s<�����Ҫ)�����d��RAM�С�
usrInit() ��VxWorksӳ���BSS�����㣻�{(di��o)��intVecBaseSet()�O(sh��)���Д�ʸ������ַ�����{(di��o)��excVecInit()��ʼ�������Д�ʸ�����{(di��o)��sysHwInit()��ʼ��ϵ�y(t��ng)Ӳ�����{(di��o)��usrKernelInit()��ʼ��wind��(n��i)�ˣ��{(di��o)��kernellnit()����wind��(n��i)�ˣ�����usrRoot()�΄�(w��)��
usrRoot()�O(sh��)�ò���ϵ�y(t��ng)�r犣���(chu��ng)���O(sh��)�䣬���b�(q��)�ӣ��{(di��o)��sysHwInit2()���bϵ�y(t��ng)�r犺��o���r��Д��Լ����ڵ��O(sh��)����Д࣬��ʼ��I��O���ļ�ϵ�y(t��ng)���{(di��o)�Ñ�(y��ng)�ó���
3 VxWorks��AT91RM9200�ϵ�BSP�O(sh��)Ӌ
3.1 AT91RM9200����
AT91RM9200��Ƭ���YԴ������ARM920T̎�����⡢16KB�ă�(n��i)��SRAM��128KB�ă�(n��i)��ROM�惦����֧��SDRAM��SRAM��Burst Flash��CompactFlash��SmartMedia�Լ�NANDFlash�ğo�p�B�ӣ�16KB�Ĕ�(sh��)��(j��)Cache��16KB��ָ��Cache����ȫ�ɾ��̵��ⲿ�����ӿ�EBI��4��32λ��PIO�����������_(d��)��122���ɾ���I��O���_(ÿ������ݔ����ơ����Д༰�_·��ݔ������)������8����(y��u)�ȼ����ɆΪ������Д�Դ�����M(j��n)�Д��������6�MӲ�����r����4��ͨ��ͬ���������հl(f��)��USART��
3��2 BSP�Ўׂ���Ҫ�ļ�����
����AT91RM9200�ă�(n��i)����ARM920T������BSP�ļ���Ҫ��VxWorks���ɭh(hu��n)��Tornado��Ŀ�target��config��all��target��config��integrator920t�ļ��A����У�a11�ļ��A����ļ����ڽ^�����(sh��)BSP���ǹ��õģ�һ����f����Ҫ�ģ��e�ǡ�configAll��h����integrator920t�ļ��A����ļ�������Ҫ������BSP�ļ����@Щ�ļ������cϵ�y(t��ng)Ӳ���������P(gu��n)��
3.2.1 ��Makeflie
Makefile�ļ����x���g��朽�����BSP��Ҏ(gu��)�t���美�g���ߵ��x���g�x헺Ͱ����ļ�·���ȣ���������VxWorksӳ���ļ�����ͣ�ͬ�r���д惦�^(q��)��С����Ϣ�����ڴ惦�^(q��)��С��Ϣ�ĸĄӱ���cConfig��h�Č���(y��ng)�Ą�ͬ������Щ����(sh��)����ԓ�ļ��ж��x����̎������͡����g���ߡ�Ŀ��(bi��o)��ַ�ȡ������BһЩ��ĵą���(sh��)�͵�ַ��

3.2.2 ��Config.h
Config��h�ļ������������^�ļ����cCPU���P(gu��n)�����ⶨ�x��VxWorks��(n��i)�˽M����������Config��h�ļ����x��Config��h�е���Ҫ�ă�(n��i)���ж��x����(d��o)�к��ĵ�ַ��
(1)���x����(d��o)��

���У�mac(O��0)��AT91RM9200оƬ�е�EMAC�O(sh��)�䣻host�����C(j��)����VxWorks��Ҫ���d���ļ�����h�����C(j��)IP��ַ��e��Ŀ��(bi��o)��IP��ַ��u���Ñ�����pw���ܴa��tn��Ŀ��(bi��o)�����Q��
(2)�ĵ�ַ
ԓ�ļ��еĵ�ַ���x����ROM_TEXT_ADRS��ROM_SIZE��RAM_LOW_ADR��SRAM_HIGH_SIZE��Ҫ�cMakefik�ļ��е����P(gu��n)���xһ�¡����O(sh��)Ӌ�д��a�δ惦���B��ARMоƬ�ⲿƬ�xCSO�ϵ�Flash���棬����ַ��Oxl0000000����ˣ����x���£�

VxWorks��ȱʡ������configAll��h���_����һ����f��ȱʡ���õ��O(sh��)���c�����_�l(f��)��Ӳ��ϵ�y(t��ng)�����ò�ͬ���Ñ���ͨ�^Cotlfig��h����׃?n��i)�ʡ���á��Ñ�횲鿴configAll.h������Config��h�Ќ�����Ҫ��ܛӲ�����úͳ�ʼ��ȥ�������磬ȱʡ������һ��������c̎��������AT9lRM9200�Л]�и��c�Ĵ�������˾�Ҫ�h�����P(gu��n)���á�]]>
VxWorks��һ����(y��u)�ݾ������鑪(y��ng)�ô��a�ṩ�˸߶ȵļܘ�(g��u)��Ӳ�������ԡ��@�N����ֲ�Ե�����VxWorks��ģ�K���O(sh��)Ӌ�� ���@�Nģ�K���O(sh��)Ӌ������Ӳ�����P(gu��n)�Ĺ��ܺ���(sh��)���x����һ�Q��弉֧�ְ���BSP���Ď��С�BSP��������_�l(f��)���Ӳ�����P(gu��n)�����ṩ��һ��һ�µĽӿڡ� �@Щ���ܰ���Ӳ����ʼ���� �Д�̎���� �Д�a(ch��n)���� Ӳ�r犺�Timer������ ���غͿ�����(n��i)����g��ӳ�䣬 �Լ���(n��i)��ߴ���Ƶȵȡ�
���ā��f�� �����N��͵�VxWorks��ֲ��
A. ������ֲ�� ��Tornado��VxWorks���_�l(f��)������ֲ��һ����ǰ��֧�ֵ������C(j��)�ϡ�
B. �ܘ�(g��u)��ֲ�� ��VxWorks ��Tornado �{(di��o)ԇ����ֲ��һ����ǰ��֧�ֵ�Ŀ��(bi��o)̎������ܘ�(g��u)�ϡ�
C. �弉��ֲ�� ��VxWorks ��ֲ��һ���µ�Ŀ��(bi��o)���ϣ� �ڴ�֮ǰ��(y��ng)ԓ�ѽ�(j��ng)����������ֲ�ͼܘ�(g��u)��ֲ��
D. ����pre-Tornado BSPs ʹ֮������Tornado ƽ�_��
E. ��ֲһ�����x�IJ�����
������ֲ�ͼܘ�(g��u)��ֲ��Ҫ�L��ȫ����VxWorksԴ���a�� �����˱��ĵķ����� �弉��ֲ���҂�ҪӑՓ�����c�� �弉��ֲֻ��Ҫ�L��VxWorks��Ӳ�����P(gu��n)���Dz���Դ���a��BSP�����{(di��o)ԇ����
�����ԁ��� �L(f��ng)�ӹ�˾��Wind River���܉��ṩ�o�͑����NBSP�� Ȼ���� �S���S���µ�CPU��Ĵ������У� �������S��͑��Լ��O(sh��)Ӌ��CPU��Ĵ������F(xi��n)�� ʹ���L(f��ng)���ѽ�(j��ng)���܉�����Ј������µ�BSP������
�������Ǟ��˽�Q�@�����}�� ����ּ�ڎ�ס�ㄓ(chu��ng)�����yԇ�µ�BSP���������Ŀ�� ��ֲVxWorks��һ���µİ�������һ���dz�������(zh��n)�ԵĹ����� ������ֻ������ֲ��ɺ���ЩVxWorks�_�l(f��)���߲��܉�ʹ�õĕr����(j��)�����IJ��Կ���ʹ��ֲ׃�ú���һ�c�������ṩ����ֲ���Ժ�ϵ�y(t��ng)Ԫ���������õ�Ԕ��(x��)������ ����Ҳ�����˻���Tornado2.0�턓(chu��ng)���Ͱl(f��)���������Ŀ����Ҫ�� ���g(sh��)��Ϣ��
�������漰��BSP �����cTornado 2.0 ����߰汾���ݣ� �������ڵ�BSP ʹ֮������Tornado 2.0 ���ஔ(d��ng)���ģ� ����A������һ��BSP��Tornado �¡�
1.1 Tornado 2.0 �������Խ�B��
SCSI 1 �Uֹ�� ����SCSI-1 �(q��)�Ӻ͎��֧���ѽ�(j��ng)���Uֹ�� �mȻ�@Щ����Ȼ��������Tornado2.0 �У����������ѽ�(j��ng)���О�U�����Ҳ����������ڌ����İ汾�С�
�� TYCO5_2���h����TYCO5_2�@���겻�ٱ�֧�֣� �͑���(y��ng)��(d��ng)ʹ��Tornado 2.0 �µ�SIO�(q��)�� ��
BSP���b��׃���� ����10��2 BSP���b�� P��������ԫ@�ø�Ԕ��(x��)���P(gu��n)�ڷ��bҪ��������� ����O��BSP�a(ch��n)Ʒ��(n��i)���ԫ@��һ�����ͮa(ch��n)Ʒ��(n��i)�ݵĵĿ��ٿ��Y(ji��)��
�ęn�� ���е��ھ��ęn�F(xi��n)������HTML��ʽ�ṩ�� ��ϵ�y(t��ng)�а�����һ���Q��refgen�Ĺ��ߣ��Á�ĬF(xi��n)���nroffݔ��a(ch��n)��HTML퓡�
VxWorks�W(w��ng)�j(lu��)�f(xi��)�h����VxWorks�W(w��ng)�j(lu��)�f(xi��)�h����Tornado 1.0.1 �Ñ��Ŀ��x������ �F(xi��n)����Ψһ��Winriver ֧�ֵąf(xi��)�h���� ���е�BSP�F(xi��n)�ڶ�ʹ�Þ�VxWorks�W(w��ng)�j(lu��)�f(xi��)�h�����ĵ��(q��)�ӳ��� VxWorks�W(w��ng)�j(lu��)�f(xi��)�h���ǻ���BSD 44 �f(xi��)�h���ġ���BSP�� BSD44 �� END �(q��)�Ӷ��ɱ�ʹ�á�END�(q��)����BSP��ȱʡ�(q��)�ӡ�
�µ��(q��)�ӣ� �S���µ�END�W(w��ng)�j(lu��)�(q��)���ѽ�(j��ng)�����뵽�(q��)�Ӯa(ch��n)Ʒ�Ё��Ա�ʹ�M���ܶ�Įa(ch��n)Ʒ��������һ�����õ�END �(q��)�ӡ�
���ɵ�ģ�M���� Tornado 2.0����һ�����ɵ�ģ�M���� �����S�_�l(f��)�ˆT��Ӳ���h(hu��n)�����m(x��)��ǰ���܉��_ʼ��(y��ng)�õ��_�l(f��)��
���ɵ�WindView��Tornado 2.0����һ�����ɵ�WindView ���ߣ� �Á�z���\�Еr���О飬 ���� <<WindView User��s Guide>> ���˽�����P(gu��n)��WindView�����ԡ�
VTS �yԇ���£� VTS����C�yԇ��������С�������Ա�ʹ���܉����_�ع�����target shell ���µ�̓�Mݔ��ݔ�����ԡ�
SCSI �yԇ���� SCSI���ܜyԇ������ǰ����ֲ�����б������ˣ� �F(xi��n)�ڿ��á�
ROM_WARM_ADRS �@���º걻���뵽BSPģ���һЩBSP�У� �������M(j��n)�뵽boot ROM ���a�ğᆢ����ڣ� �����Á�ȥ�����ڲ�ͬCPU�������ֹ�Ӌ���������ڵ�ַ�� ������r�£� ROM_WARM_ADRS�ǻ���һ��������ROM_TEXT_ADRS��ƫ�ƣ� ���磺
#define ROM_WARM_ADRS (ROM_TEXT_ADRS + 8)
�µ�SIO IOCTLs: �µ�SIO IOCTL ���a�Á�֧��modem���ƾ�·�� IOCTLs ����SIO_OPEN��SIO_HUP��(d��ng)�O(sh��)�䱻���_���P(gu��n)�]�r֪ͨ�(q��)�ӳ��� ��SIO_HW_OPTS_SET ��SIO_HW_OPTS_GET���S�Ñ������ַ��L�ȡ���ż��ֹͣλ��modem ���ƾ�·�� ���xλ CLOCAL ��ֹ��modem ���ƾ�·���(q��)�ӳ����е�ʹ�ã� ���˱����������ԣ� CLOCAL�x���Wind River BSP��Ĭ�J(r��n)���x��ġ�
Target.txt �ļ����h���� �ı���ʽ��target.nr �ļ�����Windows �����Ñ����a(ch��n)�����ѽ�(j��ng)���h���ˣ� ĿǰUNIX ��WINDOWSƽ�_��ʹ�Þg�[������xHTML��ʽ���ęn�� ��������refgenȡ��nroff��ݔ�벢�Үa(ch��n)��HTML��ݔ����
1.2 �M(j��n)��BSP�_�l(f��)��һЩ�țQ�l����
���ȣ� �㑪(y��ng)��(d��ng)�е�C�ͅR���Z�Ե�֪�R�� ��Ϥ�O(sh��)���(q��)�ӣ� ��Ϥ�Д࣬ ��þ���ͬӲ���ӿڵ�ܛ���_�l(f��)��(j��ng) ���⣬ �㑪(y��ng)��(d��ng)��ϤTornado�_�l(f��)�����������ѽ�(j��ng)�x�^��Tornado�Ñ�ָ�ϡ���� �㑪(y��ng)��(d��ng)��һ���������Ŀ��(bi��o)ϵ�y(t��ng)�����õ�CPU�ą���BSP�� �@���Թ�(ji��)ʡ��Ĵ����r�g��
��Ҳ��(y��ng)��(d��ng)��һ���m��������Ŀ�ܘ�(g��u)��ģ��BSP���Լ�ģ���(q��)�ӳ��� �ֿ͑�ُ�Iһ��������O(sh��)���(q��)�ӳ����Դ���a��
]]>
Tornado�a(ch��n)����Ŀ��(bi��o)���a��Ĭ�J(r��n)��ʽ��Motorola�_�l(f��)���Flash���d����ֻ�����dIntel 32bit��ʽ����회������M(j��n)���D(zhu��n)�Q���܌����a���뵽Flash��ȥ��������Motorola��S2��ʽ�����f����ʽ���D(zhu��n)�Q��
S2��һ�N���H��ʽ���£�
S0120000626F6F74726F6D5F726532E686578CF
S214000000060000EABD0300EAA50300EAB70300EA1B
S804000000FB
���е�һ�l��ӛ䛵��^�����ڶ��l�ǵ�ַ�͌���(y��ng)�Ĕ�(sh��)��(j��)ӛ䛣�S2��ʾ24λ��ַ�ĸ�ʽ��14��ʾ��ʼ��ַ000000�͌���(y��ng)�Ĕ�(sh��)��(j��)����żЧ�Ŀ��͡�����λ��ʾ����ʮ���M(j��n)�Ɣ�(sh��)����У�͡����һ�l��ӛ䛵ĽY(ji��)����(bi��o)־�� Intel 32 bit��һ�N���H��ʽ���£�
��020000040000FA
��10000000060000EABD0300EABB50300EAB70300EA20
��������
��00000001FF
���е�һ�l��ӛ䛵��^������ʾ32λ��ַ�ĸ�16λ��0000���ڵڶ��lӛ��У�����ʾӛ䛵��_ʼ��10��ʾӛ䛌��Ă���(sh��)��0000��ʾ��ʼ��ַ��ֵ������λ��ʾУ�͡����һ�l��ӛ䛵ĽY(ji��)����(bi��o)־��
�˽��@�ɷN��ʽ������ʽ�D(zhu��n)�Q������Ǻܺ��ε�һ���¼���
2 BSP���O(sh��)Ӌ�^�̼�ܛ�����淽��
2.1 �v��ROM/Flash��ϵ�y(t��ng)���η�����r
����LPC2104ֻ��16KB��RAM����ֻ�ܳ�����a�͔�(sh��)��(j��)����Flash�У��_�C(j��)���ٌ���(sh��)��(j��)��ؐ��RAM��(n��i)����������Ȼ����Flash�в��������\�У������^��ROM Resident Image�O(sh��)Ӌ����Tornado�����_�l(f��)�h(hu��n)���£��xȡtemplatARM��BSP���ɵ�bootrom_res.hex�ļ������@�NROM_Resident�ļ�������a�Ρ���(sh��)��(j��)�Ρ��ї��ηքe��Flash��RAM�е���r��D1��
Flash�ķ���͌���(y��ng)�����Ķ��x
Ƭ��(n��i)Flash�ĵ�ַ���g��0x00000000��0x00020000
ROM_TEXT_ADRS=00000000���a�ε���ʼ��ַ
ROM_SIZE=00020000 Flash�Ĵ�С
RAM�ķ���͌���(y��ng)�����Ķ��x
Ƭ��(n��i)RAM�ĵ�ַ���g��0x40000000��0x40003FFF
0x40000000��0x4000003F��64�ֹ�(ji��)�����Д�������LOCAL_MEM_LOCAL_ADRS=0x400000000
RAM_LOW_ADRS=0x40000600
RAM_HIGH_ADRS=0x40000F00
LOCAL_MEM_SIZE=0x00020000
����(j��)����ķ�������Makefile��config.h������(y��ng)�IJ��֣�ʹ����һ�ӡ�
�ї��ķ���
�ї��ĵ�ַ�O(sh��)��STACK_ADRS����ϵ�y(t��ng)���x����RAM_LOW_ADRS�_ʼ������չ��
2.2 romlnit.s�ļ�
ARM�Į������������1��LPC2104�Į���������Ҳһ�ӣ�ֻ���^����������ӳ�䵽RAM���^��������0x40000000�_ʼ��32���ֹ�(ji��)�� ��1 ARM��������λ��
�� ַ�� ��
0x0000 0000��(f��)λ0x0000 0004δ���xָ��0x0000 0008ܛ���Д�0x0000 000C�A(y��)ȡָ��ֹ���Ĵ惦��ȡָ���e��0x0000 0010��(sh��)��(j��)��ֹ����(sh��)��(j��)�L���惦�����e��0x0000 0014����0x0000 0018IRQ0x0000 001CFIQ��*��ARM�ęn�И�(bi��o)�R�鱣����ԓλ�ñ�Boot�b�d������������Ч���Ñ������P(gu��n)�I�֡�
����ARM�wϵ�Y(ji��)��(g��u)��VxWorks�������Ă����� ��ں���(sh��)�飺excEnterUndef��ecxEnterSwi��excEnterPrefetchAbort��excEnterDataAbort��ֱ���ڌ���(y��ng)��λ����Bָ����������(y��ng)�ĺ���(sh��)�м��ɡ����a���£�_ARM_FUNCTION��romInit��
_romInit��
ARM�Į������������1��LPC2104�Į���������Ҳһ�ӣ�ֻ���^����������ӳ�䵽RAM���^��������0x40000000�_ʼ��32���ֹ�(ji��)��
����ARM�wϵ�Y(ji��)��(g��u)��VxWorks�������Ă�������ں���(sh��)�飺excEnterUndef��excEnterSwi��excEnterPrefetchAbort��excEnterDataAbort��ֱ���ڌ���(y��ng)��λ����Bָ����������(y��ng)�ĺ���(sh��)�м��ɡ����a���£�
_ARM_FUNCTION��romInit��
_romInit:
cold:
B start /*��(f��)���*/
B excEnterUndef /*��x���� */
B excEnterSwi /*ܛ�Д�*/
B excEnterPreftchAbort/*��ȡָ����*/
B excEnterDataAbort /*��(sh��)��(j��)����*/
.ascii "20B9" /*�������g���ɸ�ʽ�D(zhu��n)�Q��������0xB9205F80*/
LDR pc,[pc,#-0xFF0]/*IRQ�Д���ں���(sh��)*/
B FIQ_Hander /*FIQ�Д���ں���(sh��)*/
IRQ�Дຯ��(sh��)����ں���(sh��)��C�Z�Ԍ���sysClkInt()��sysAuxClkInt()����Ҫ�Լ�����F(xi��n)���ͻ֏�(f��)�F(xi��n)�������a�飺
_ARM_FUNCTION��TIME0_IRQ_Hander��
_TIME0_IRQ_Hander:
SUB LR,LR,#4 /*Ӌ�㷵�ص�ַ*/
STMFD SP����{R0-R11��R12��LR} /*�����΄�(w��)�h(hu��n)��*/
MRS R3��SPSR /*�����B(t��i)*/
STMFD SP����{R3}
BL sysClkInt /*�{(di��o)��C�Z�Ե��Д�̎������*/
LDMFD SP����{R3}
MSR SPSR_cxsf,R3
LDMFD SP!,{R0-R11��R12��PC}
_ARM_FUNCTION(TIME1_IRQ_Hander)
_TIME1_IRQ_Hander��
SUB LR��LR��#4 /*Ӌ�㷵�ص�ַ*/
STMFD SP����{R0-R11��R12��LR} /*�����΄�(w��)�h(hu��n)��*/
MRS R3��SPSR /*�����B(t��i)*/
STMFD SP����{R3}
BL sysAuxClkInt /*�{(di��o)��C�Z�Ե��Д�̎������*/
LDMFD SP����{R3}
MSR SPSR_cxsf,R3
LDMFD SP����{R0-R11��R12��PC}
�����Дຯ��(sh��)VxWorks�������Ñ��Լ����x���������£�����FIQ_Exception()����(sh��)��C�Z�Զ��x�����ļ��_ʼ��globl FUNC(FIQ_Exception)����
FIQ_Hander:
STMFD SP!,{R0-R12,LR}
BL FIQ_Exception
LDMFD SP!,{R0-R12,LR}
SUBS PC,LR,#4
��(d��ng)ϵ�y(t��ng)��늕r�������ַ0x00000014��(n��i)�Ĕ�(sh��)��(j��)��0xB9205F80,�t��Flash�����ַ�_ʼ��(zh��)�У�Ҳ���Lj�(zh��)��romInit��������(sh��)���˺���(sh��)�����ӷ�ʽBOOT_COLD����R0�У�����romStart�ą���(sh��)����ϵ�y(t��ng)�O(sh��)��SVC32ģʽ������ֹIRQ��FIR�Д࣬�O(sh��)�ú�ϵ�y(t��ng)�ї�ָ�����romStart()��(zh��)�С���C�˲��ֳ����(zh��)����r����ε�һ�N�������ÅR����һ���c����������ָ�����Ĉ�(zh��)����r�����г���PINSEL0��PINSEL1��IODIR��SPI_IOCON�����^�ļ�templatARM.h����define���x��
#define PINSEL0 0xE002C000
#define PINSEL1 0xE002C004
#define IODIR 0xE0028008
#define SPI_IOCON 0x00003DD0
�҂��O(sh��)Ӌ���c���������¡��������romInit.s�m��(d��ng)?sh��)�λ�ã����Զ�λ������\����r��
LDR r0,=PINSEL0
MOV r1,#0
STR r1,[R0],#4
STR r1,[R0]
LDR r0,=PINSEL1
MOV r1,#0
STR r1,[R0],#4
STR r1,[R0]
LDR r0,=IODIR
LDR r1,SPI_IOCON
STR r1,[R0]
��Tornado�����_�l(f��)�h(hu��n)���£�templatARM��BSP����bootrom_res.bin�ļ����Խ���ASD1.2��AXD���R���{(di��o)��ʽ���M(j��n)�Іβ�������{(di��o)ԇ��
2.3 sysLib.c�ļ�
���@���ļ��У���Ҫ����sysHwInit��������(sh��)��(n��i)���F(xi��n)ϵ�y(t��ng)���O(sh��)�����ã��Д��������Ŀ�ؐ����ӳ�䣬ϵ�y(t��ng)���r���Д������İ��b�����ڳ�ʼ���ȹ��ܡ��ڴ���߀�]���{(di��o)֮ͨǰ�����Խ��������ᵽ�ĺ����c������(sh��)���F(xi��n)����Ķ�λ������C�Z�����¶��x���£��������뱾�ļ����m��(d��ng)?sh��)�ַ������ָʾ��������(sh��)�Ĉ�(zh��)����r����
#include ��LPC2106.h��
PINSEL0=0x00000000;
PINSEL1=0x00000000;
IODIR=0x00003DD0;
ϵ�y(t��ng)�ij�ʼ���������cӲ��ϵ�y(t��ng)�߶����P(gu��n)�����@���ֵĴ��a�����^��Ľ�ጣ�Ո�������aעጡ��ׂ��������x���£�
#define Fosc 11059200 /*�����l�ʣ�10MHz��25MHz��(y��ng)�c���Hһ��*/
#define Fcclk(Fosc *4)
/*ϵ�y(t��ng)�l�ʣ���횞�Fosc������(sh��)����1��32������<=60MHz*/
#define Fcco (Fosc *4)
/*CCO�l�ʣ���횞�Fcclk��1��2��4��8����������156MHz��320MHz*/
#define Fpclk (Fcclk/4)*2
/*VPB�r��l�ʣ�ֻ�ܞ飨Fcclk/4����1��2��4��*/
2.4 templateTimer.c�ļ�
���ļ���Ҫ���F(xi��n)�cϵ�y(t��ng)�r犺�ϵ�y(t��ng)�o���r����P(gu��n)�ĺ���(sh��)���P(gu��n)��ϵ�y(t��ng)�r犵ĸ�����(sh��)���x���£�ϵ�y(t��ng)�o���r犵ĸ�����(sh��)�cϵ�y(t��ng)�r�һ�ӣ�ֻ회�T0�Q��T1���ɣ���
/*SysClkInt(),�˺���(sh��)ÿ���r�Tick���{(di��o)��һ��*/
void sysClkInt��void��{
/*֪ͨϵ�y(t��ng)�Д�Y(ji��)��*/
T0IR=0x01��
T0MR0+=(Fpclk/sysClkTicksPerSecond)��
VICVectAddr=0;
/*�{(di��o)��ϵ�y(t��ng)�Дຯ��(sh��)*/
if(sysClkRoutine!=NULL)
(*sysClkRoutine)(sysClkArg);
}
/*sysClkDisable()��ֹϵ�y(t��ng)�r�*/
void sysClkDisable(void){
if(sysClkRunning){
/*��ֹϵ�y(t��ng)�r��Д�*/
VICIntEnClr=0x10;
T0TC=0;
SysClkRunning=FLASE;
}
}
/*sysClkEnable()����ϵ�y(t��ng)�r�*/
void sysClkEnable(void){
static BOOL connected=FALSE;
if(��connected){
/*���r��0��ʼ��*/
T0TC=0��
T0TCR=0x01��
T0MCR=0x01��
T0MR0=��Fpclk/sysClkTicksPerSecond��;
VICIntEnable=0x10;
Connected=TRUE;
}
if(!sysClkRunning){
T0TC=0;
sysClkRunning=TRUE;
}
}
3 ��(y��ng)�ó����O(sh��)Ӌ
����EasyARM�_�l(f��)�屾���YԴ�^�٣��������cPC�C(j��)�B�ӳ������C(j��)һĿ��(bi��o)�C(j��)���{(di��o)ԇ�h(hu��n)����ͨ�^���C(j��)�����a���d��Ŀ��(bi��o)�C(j��)�و�(zh��)�С�������O(sh��)Ӌ��(y��ng)�ó���r��������bootConfig.c�ļ��е�bootCmdLoop��������(sh��)������bootrom_res.hex�ļ�����ʽ�D(zhu��n)�Q�����d��Flash���\�У���PC�C(j��)�Ͻ��������{(di��o)ԇ���ִ�ӡ�{(di��o)ԇ��Ϣ�����w�^���ǣ���Tornado2.2�����_�l(f��)�h(hu��n)�����xȡBuild->Build Boot Rom��BSP�x��templateARM��Image�x��bootrom_res.hex�����g���xgnu,�_�J(r��n)���ɡ�
4 �Y(ji��)
VxWorks����Ҫ��Ψһ���(q��)�ӳ�����ϵ�y(t��ng)�r犣�����Ԕ��(x��)�o����ϵ�y(t��ng)�r�Դ���a��ͬ�r߀�o���˴���ͨ�ŵ�Դ���a��ʹ���_�l(f��)���cPC�C(j��)������ͨ�š����⣬�o���˻���VxWorks�đ�(y��ng)�ó�����O(sh��)Ӌ����������BSP���O(sh��)Ӌ��������һ���ܾ�������(zh��n)�ԵĹ��������ű��Č�VxWorks��BSP�O(sh��)Ӌ������������
]]>VxWorks������Wind River��˾�_�l(f��)��Ƕ��ʽ���r����ϵ�y(t��ng)�����и����ܡ��ɲÜp�Ժõ����c����֧�ֶ�N̎����(��PowerPC��X85��ARM��SPARC)���Ԇ����ԁ����������õ���Ժ�Խ�Č��r�Ա��V���ؑ�(y��ng)����ͨ�š����ա�����ȸ߾��⼼�g(sh��)�����r��Ҫ��O�ߵ��I(l��ng)���С�BSP(Board Support Package���弉֧�ְ�)��������ᘌ������Ӳ��ƽ�_�������ϵ�y(t��ng)��(n��i)���ṩ�����ӿڣ�ʹ����ϵ�y(t��ng)�܉����ڵ�Ӳ�������όӑ�(y��ng)�����ξ��wӲ����VxWorks�ĸ߿���ֲ�Ծ���ͨ�^BSP���F(xi��n)�ġ�AT91RM9200��Atmel��˾���a(ch��n)��һ��A(y��)RM9��оƬ���������c��B��VxWorks��ֲ��ԓоƬ�^����BSP�Ķ����^�̡�
1 BSP����
BSPͨ����ָᘌ����w��Ӳ��ƽ�_���Ñ��������Ć��Ӵ��a�Ͳ����O(sh��)���(q��)�ӳ���ļ��ϡ��������F(xi��n)�Ĺ��ܰ�����ʼ�����(q��)�Ӳ����O(sh��)�䡣�������BSP�H��Ҫ֧��̎������(f��)λ����ʼ�����(q��)�Ӵ��ںͱ�Ҫ�ĕr�̎����BSP�������ڲ���ϵ�y(t��ng)���Եģ���ͬ�IJ���ϵ�y(t��ng)����(y��ng)��ͬ��ʽ��BSP����ˣ��ڌ�B(t��i)SP�rһ��Ҫ����Ҫ��IJ���ϵ�y(t��ng)��BSP�Ķ��x��ʽ�팑����VxWorksϵ�y(t��ng)�У�BSP�ǽ��ڵ�Ӳ���h(hu��n)����VxWorks֮�g��һ��ܛ���ӿڣ�������Ҫ������ϵ�y(t��ng)��늺��ʼ��Ŀ��(bi��o)�C(j��)Ӳ����VxWorks�����ṩ����Ӳ���(q��)�ӳ���BSP��VxWorksϵ�y(t��ng)�еČӴ��P(gu��n)ϵ��D1��ʾ��

BSP����N�忨��Ӳ�������ṩ�˽y(t��ng)һ��ܛ���ӿڣ�����Ӳ����ʼ�����Д�IJ���̎����Ӳ���r犺Ͷ��r����������(n��i)���ַӳ�䣬�Լ���(n��i)�����ȡ�ÿ��BSP߀����һ��ROM���ӻ��������әC(j��)�ơ�
2 VxWorks������(d��o)�^��
�ھ���B(t��i)SP֮ǰ������Ҫ�˽�����ϵ�y(t��ng)�Ć����^�̡�VxWorks��ӳ���ɴ��a�Ρ���(sh��)��(j��)�κ�BSS��3���ֽM�ɡ�VxWotks��(n��i)�˿��Է֞�3�N���ɼ��d���ӳ����ROM��VxWorksӳ���RoM�v����ӳ���@3�N��͵�ӳ��M���Dz�һ�ӵģ���ˆ����^�������^(q��)�e��
�ɼ��dӳ�����VxWorks��Boot ROM�ɲ��փ�(n��i)�ݣ��ɲ����Ǫ�����(chu��ng)���ġ����ȣ���ϵ�y(t��ng)����(d��o)���a��ROM����(d��o)����ᵽRAM_HIGH_ADRS��Ȼ��ROM����(d��o)�����_ʼ�\�У���VxWorksӳ����d��RAM_LOW_ADRS��֮�����D(zhu��n)��VxWorksӳ���b���c��
����ROM��VxWorksӳ����BSP��ʼ���r������lmage��ȫ�ᵽRAM�Ј�(zh��)�У��������a�κ͔�(sh��)��(j��)�Ρ��ڿ�ؐ��(zh��)���ꮅ��ϵ�y(t��ng)���ƙ�(qu��n)�D(zhu��n)�ƽoRAM��VxWorksӳ��ij�ʼ�����a��
ROM�v����ӳ��ֻ�nj�ROM��VxWorksӳ��Ĕ�(sh��)��(j��)�κ�BSS�ο�ؐ��RAM�У���ɺ�ϵ�y(t��ng)���ƙ�(qu��n)�D(zhu��n)�ƽoROM��Flash��VxWorksӳ��ij�ʼ�����a�����a������ROM�в���ROM���\�С���ROM���\�е�VxWorksӳ����Ҫ����˹�(ji��)ʡRAM���g�������IJ����t���\���ٶ�����
�D2�͈D3�քe�����d�ͺ�ROM��VxWorksӳ��ij�ʼ�����̡�

������ROM��VxWorks��(n��i)�ˆ������̞������f�����ļ������ã�
romlnit()���憢����ͣ������Дࣻ��ʼ����(n��i)��ͼĴ���������Cache����ʼ��CPU�����ї�ָᘶ�λ�ڱ���ؐBoot ROMӳ����RAM�ĵ�ַ������romStart()��
roraStart()����(j��)��ͬ��ӳ����͌�VxWorksӳ��IJ�ͬ���ֽ≺�s<�����Ҫ)�����d��RAM�С�
usrInit() ��VxWorksӳ���BSS�����㣻�{(di��o)��intVecBaseSet()�O(sh��)���Д�ʸ������ַ�����{(di��o)��excVecInit()��ʼ�������Д�ʸ�����{(di��o)��sysHwInit()��ʼ��ϵ�y(t��ng)Ӳ�����{(di��o)��usrKernelInit()��ʼ��wind��(n��i)�ˣ��{(di��o)��kernellnit()����wind��(n��i)�ˣ�����usrRoot()�΄�(w��)��
usrRoot()�O(sh��)�ò���ϵ�y(t��ng)�r犣���(chu��ng)���O(sh��)�䣬���b�(q��)�ӣ��{(di��o)��sysHwInit2()���bϵ�y(t��ng)�r犺��o���r��Д��Լ����ڵ��O(sh��)����Д࣬��ʼ��I��O���ļ�ϵ�y(t��ng)���{(di��o)�Ñ�(y��ng)�ó���
3 VxWorks��AT91RM9200�ϵ�BSP�O(sh��)Ӌ
3.1 AT91RM9200����
AT91RM9200��Ƭ���YԴ������ARM920T̎�����⡢16KB�ă�(n��i)��SRAM��128KB�ă�(n��i)��ROM�惦����֧��SDRAM��SRAM��Burst Flash��CompactFlash��SmartMedia�Լ�NANDFlash�ğo�p�B�ӣ�16KB�Ĕ�(sh��)��(j��)Cache��16KB��ָ��Cache����ȫ�ɾ��̵��ⲿ�����ӿ�EBI��4��32λ��PIO�����������_(d��)��122���ɾ���I��O���_(ÿ������ݔ����ơ����Д༰�_·��ݔ������)������8����(y��u)�ȼ����ɆΪ������Д�Դ�����M(j��n)�Д��������6�MӲ�����r����4��ͨ��ͬ���������հl(f��)��USART��
3��2 BSP�Ўׂ���Ҫ�ļ�����
����AT91RM9200�ă�(n��i)����ARM920T������BSP�ļ���Ҫ��VxWorks���ɭh(hu��n)��Tornado��Ŀ�target��config��all��target��config��integrator920t�ļ��A����У�a11�ļ��A����ļ����ڽ^�����(sh��)BSP���ǹ��õģ�һ����f����Ҫ�ģ��e�ǡ�configAll��h����integrator920t�ļ��A����ļ�������Ҫ������BSP�ļ����@Щ�ļ������cϵ�y(t��ng)Ӳ���������P(gu��n)��
3.2.1 ��Makeflie
Makefile�ļ����x���g��朽�����BSP��Ҏ(gu��)�t���美�g���ߵ��x���g�x헺Ͱ����ļ�·���ȣ���������VxWorksӳ���ļ�����ͣ�ͬ�r���д惦�^(q��)��С����Ϣ�����ڴ惦�^(q��)��С��Ϣ�ĸĄӱ���cConfig��h�Č���(y��ng)�Ą�ͬ������Щ����(sh��)����ԓ�ļ��ж��x����̎������͡����g���ߡ�Ŀ��(bi��o)��ַ�ȡ������BһЩ��ĵą���(sh��)�͵�ַ��

4 ���g����ӳ��
ϵ�y(t��ng)������ɺ��ЃɷN���g��ʽ��һ�N����Tornado���M(j��n)�о��g������ӳ���ļ�����һ�N��ֱ����Make���߾��g����Ҫ�����_���ļ����b�d��Ŀ��(bi��o)���е�VxWorksӳ��ȡ�Q��ʹ�õ����d��ʽ��������Ҫ�������N��
��VxWorks���@�ǻ���RAM��ӳ��VxWorks��Ҫͨ�^Ŀ��(bi��o)���ϵ�����(d��o)����Ĵ��ڻ�W(w��ng)�ڰ������d��Ŀ��(bi��o)���RAM���\�С���Tornado�_�l(f��)�h(hu��n)���£��@��һ��Ĭ�J(r��n)�x헣���Ҫ�����{(di��o)ԇ�A�Ρ�ʹ�������C(j��)�ϵ�WindSh���ߺͷ�̖����
��VxWorks��st���@Ҳ�ǻ���RAM��ӳ����Ҫͨ�^����(d��o)ROM��VxWorksӳ�����d��Ŀ��(bi��o)�C(j��)��(n��i)���в��܈�(zh��)�С�ԓ�����ļ���(n��i)�÷�̖����
��VxWorkS_rom���@��һ���lj��s������ROM��ӳ�����@�������ļ���(zh��)��ǰ���Ȱ��Լ���ؐ��Ŀ��(bi��o)�C(j��)RAM�С��@�N��͵�ӳ��ͨ���چ����A���ٶȱ��^���������a��ROM�Ј�(zh��)�У�����(zh��)���A�α�ROM�v���͵�ӳ��Ҫ�졣
��VxWorks��st_rom���@�ǻ���ROM���s��VxWorksӳ�����ڈ�(zh��)��ǰ�Ȱ��Լ��≺����ؐ��Ŀ��(bi��o)�C(j��)RAM�Ј�(zh��)�С�
��VxWorks��res_rom���@��ROM�v���͵ķlj��sVxWorks��ӳ�����ڈ�(zh��)��ǰ�є�(sh��)��(j��)�ο�ؐ��Ŀ��(bi��o)�C(j��)RAM�С��@�N��͵�ӳ���چ����A�α��^�죬����Ŀ��(bi��o)�C(j��)�ψ�(zh��)�е��ٶȱȻ���ROM��͵�ӳ����(���CPU�L��ROM���L��RAMҪ��)��ͨ����RAM���g���^С��Ŀ��(bi��o)�C(j��)��ʹ���@�N��͵�ӳ��
5 ��Ҫע��Ć��}
���ȣ���(y��ng)ԓ������romInit��s���M(j��n)���^��ij�ʼ��������ԓʷ����ֻ���M(j��n)�б�Ҫ����СӲ����ʼ������Ӳ���ij�ʼ��������sysHwInit()����ɵġ����⣬romTnit��s�еĴ��a����(y��ng)��(d��ng)������ģ�K��(sh��)�{(di��o)�á�
��Σ���(y��ng)ԓ����sysAlib��s�й���̫�١�BSP�_�l(f��)�ˆTͨ���e�`���J(r��n)����romInit��s���ʼ���^���O(sh��)�䲻��Ҫ��sysAlib��s�����³�ʼ�������H�ϣ�VxWorksӳ���J(r��n)������������(d��o)ӳ���������(d��o)�ģ���ˣ�����������O(sh��)�úͳ�ʼ���������Լ���Ҫʹ�õ��O(sh��)�䡣sysInit()��ԓ�ļ�������Ҫ��һ������(sh��)��Ҳ�ǵ�һ������(sh��)��ԓ�����кܶ���cromInit()����ͬ�ģ�Ŀ���DZ��C��(n��i)��ӳ�����\���c�䆢�ӕr��ܛӲ���h(hu��n)���߶�һ�¡�
����ض���BSF���(q��)�ӳ�����ģ�ֻ�����ض���BSPĿ��¡����O(sh��)Ӌ��Ŀ䛞�target/config��integra-tor920t����Ҫֱ����target��src��drv�Լ�target��h/drv���ġ�ֻ���L(f��ng)�ӹ�˾��Դ������ܴ�����@ЩĿ��¡�
6 �Y(ji��)Փ
�����ڽ�BBSP�ĸ�����ú�vxWorksӳ�����Լ�ϵ�y(t��ng)�������̵Ļ��A(ch��)�ϣ���Atmel��˾���a(ch��n)��ARM9̎����AT91RM9200���������c��B��VxWorks��BSP�O(sh��)Ӌ����Ҫ�ĵĎׂ���Ҫ�ļ�������������Ҫע��Ć��}���M��Ŀ��(bi��o)��Ӳ����ͬ��BSP�Č��F(xi��n)Ҳ���M��ͬ��������˼����һ�ӵġ����O(sh��)Ӌ������_�l(f��)���ϵ�y(t��ng)��ֲ�ͺ��m(x��)�đ�(y��ng)�ó����_�l(f��)��һ���ą����rֵ��
<!--[if !supportLists]-->1 <!--[endif]-->����
��D1��Ƕ��ʽϵ�y(t��ng)���{(di��o)ԇ����һ���ͨ�^PC�������C(j��)���ϵļ����_�l(f��)�h(hu��n)�����澎�gᘌ��ض��·�壨Ŀ��(bi��o)�C(j��)���ij���Ȼ����ͨ�^Ŀ��(bi��o)���JTAG�����ڻ�W(w��ng)�ڵ�;�����d��Ŀ��(bi��o)�����\�С���ˣ����˘�(g��u)��һ��Ƕ��ʽϵ�y(t��ng)�ČW(xu��)��(x��)�h(hu��n)��������һ�K����CPU���惦����I/O�·��Ŀ��(bi��o)�·�������DZ�Ҫ�ġ��mȻ�S�༯���_�l(f��)�h(hu��n)������ģ�Mܛ�������H����ָ���ģ�M�����o��ģ�M������Ŀ��(bi��o)�C(j��)Ӳ��ƽ�_�����������ֻ���M(j��n)�Б�(y��ng)�ó����������ģ�M�_�l(f��)�����ǣ����������˶��ܓ���һ�K�������·�塣���@�N��r�£��҂�?n��i)�Θ?g��u)��һ��ģ�M���_�l(f��)�h(hu��n)������W(xu��)��(x��)Ч������ͬ������ȫ�挍���·��һ���أ�����ԇ�D���ˆ��}�����w��(n��i)�ݰ����Ă����棺
<!--[if !supportLists]-->? <!--[endif]-->����VMware��ܛ��ģ�M�挍��Ŀ��(bi��o)�C(j��)��
<!--[if !supportLists]-->? <!--[endif]-->��(g��u)��VMware̓�MPC��VxWorks BSP������Bootrom��OSӳ��
<!--[if !supportLists]-->? <!--[endif]-->��Tornado���P(gu��n)�O(sh��)�ã��B�������C(j��)�cĿ��(bi��o)�C(j��)�������{(di��o)ԇͨ����
<!--[if !supportLists]-->? <!--[endif]-->��һ�����εđ�(y��ng)�ó������d��Ŀ��(bi��o)ϵ�y(t��ng)�\�С�
id="_x0000_t75" coordsize="21600,21600" o:spt="75" o:preferrelative="t"
path="m@4@5l@4@11@9@11@9@5xe" filled="f" stroked="f">
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D1 Ƕ��ʽϵ�y(t��ng)���{(di��o)ԇ
���Ĺ�������KĿ��(bi��o)�飺
��1��VxWorks��VMware���ӳɹ�������\�У���D2��
style='width:267pt;height:195pt'>
o:title="vxworks in vmware" />
<!--[if !vml]--><!--[endif]-->
�D2 ��VMware���\�е�VxWorks
��2������Tornado��ᘌ�Ŀ��(bi��o)�徎�g�����M(j��n)���{(di��o)ԇ����D3��
style='width:334.5pt;height:231pt'>
o:title="tornado in run" />
<!--[if !vml]--><!--[endif]-->
�D3 �cĿ��(bi��o)�C(j��)�����{(di��o)ԇͨ����Tornado
<!--[if !supportLists]-->2 <!--[endif]-->ģ�MĿ��(bi��o)�C(j��)
PCҲ����Ŀ��(bi��o)�C(j��)���������c�����H�ϣ��҂�����PC����Ƕ��ʽϵ�y(t��ng)��Ŀ��(bi��o)�C(j��)���Ķ���(g��u)����D4��ʾ���_�l(f��)ģ�ͣ�
type="#_x0000_t75" style='width:182.25pt;height:59.25pt' o:ole="">
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D4 PC����Ŀ��(bi��o)�C(j��)
���z�����@�N�������H�Ϸdz��韩��ͬ�r�_�Ӄ��_PC�M(j��n)���{(di��o)ԇ��ʹ���������������ĥ����ˣ��҂����Խ���VMware���ڱ��C(j��)��̓�M����һPC��
VMware�Ĵ_����ŵ���Ʒ����ͬһPC�ϣ�����VMware�������b���еIJ���ϵ�y(t��ng)�����Ҳ���ϵ�y(t��ng)֮�g���ГQ����Ҫ��������X��VM�����x��Virtual Machine����̓�M��һ��߉����X���������ṩ����Intel CPU��̓�MPCϵ�y(t��ng)�h(hu��n)��������CPU����(n��i)�桢BIOS��Ӳ�P���������Ӳ���O(sh��)�䡣
�����҂��v����VMware������һ�_̓�MPC�IJ��E��
��1�����d�����bVMware��
��2��ʹ��VMware��?q��)�����һ��ᘌ�VxWorks��̓�M�C(j��)��
�˲��E��ע���ڲ���ϵ�y(t��ng)���x��other������D5��
style='width:277.5pt;height:246pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D5 �x��Other����ϵ�y(t��ng)
����Ŀ��(bi��o)�C(j��)��Kͨ�^ܛ�P���ӣ����Ҫ�������X����ܛ�(q��)�����z������(d��ng)���ճ�ʹ�õ�ܛ�P�����˹Ŷ�������������X���ܛ�(q��)����ˣ��҂��ف�����һ����ð���Ӯa(ch��n)Ʒ��̓�Mһ��ܛ�(q��)����һ����ŵĹ���ܛ��RamDiskNT���҂��ṩ���@һ�������D6��ʾ����RamDiskNT̓�Mһ��1.44Mܛ�P�ķ�����
style='width:289.5pt;height:291.75pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D6 ̓�Mܛ�(q��)��ܛ�P
�H�H̓�Mһ��ܛ�(q��)�Dz���ģ����@��ܛ�(q��)���ӵ��҂�������̓�M�C(j��)�в������������D7��ʾ������ܛ�(q��)���̓�M�C(j��)Ӳ���O(sh��)�á�
id="_x0000_i1032" type="#_x0000_t75" style='width:414.75pt;height:319.5pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D7 ����ܛ�(q��)��̓�M�C(j��)
<!--[if !supportLists]-->3 <!--[endif]-->��(g��u)��BSP
<!--[if !supportLists]-->3.1 <!--[endif]-->���d�;��g�W(w��ng)���(q��)��
VMware���\�������ϵIJ���ϵ�y(t��ng)�ṩ̓�M�W(w��ng)��֧�֣�ԓ�W(w��ng)����ͼ���AMD��PC-NET�����H�ϣ���Tornado�_�l(f��)�����ѽ�(j��ng)������ԓ��;W(w��ng)�����(q��)�ӳ�����(j��ng)�^�yԇ������VMware�o������������������Ҫ��AMD�ľW(w��ng)վ���d���µ��(q��)�ӳ���
���d�õ�����һ���Ɉ�(zh��)�еİ��b�����\��ԓ����?q��)��õ�һ�����s����һ�������ļ�������ԓ������Ҫ�����s��ֱ��ጷŵ�TornadoĿ��¡������ʾ�Ƿ����S���w�ļ����t�x�����S��
�˺����²��E����(q��)�ӳ���ľ��g����Q��
��1�����_һ�������_���ڣ��\����̎������
C:\tornado2.2\host\x86-win32\bin\torVars.bat;
ԓ��̎���ļ������O(sh��)�íh(hu��n)��׃�������(n��i)�ݞ飺
rem Command line build environments
set WIND_HOST_TYPE=x86-win32
set WIND_BASE=C:\Tornado2.2
set PATH=%WIND_BASE%\host\%WIND_HOST_TYPE%\bin;%PATH%
����]���O(sh��)�óɹ��������ֹ��O(sh��)���@Щ�h(hu��n)��׃����
��2����λ��C:\tornado2.2\target\src\drv\endĿ䛣��\�У�
make CPU=PENTIUM tool=gnu ln97xend.o
��3����λ��C:\tornado2.2\target\lib\pentium\PENTIUM\commonĿ䛣�������һ�����ɵ��ļ�ln97xend.o��(f��)�Ƶ���Ŀ��¡���ݴ�Ŀ��µ��ļ�libdrv.a��
��4���\������arpentium -d libdrv.a ln97xEnd.o���h��libdrv.a��ԭ�е�ln97xEndģ�K��
��5���\������arpentium -ra iOlicomEnd.o libdrv.a ln97xEnd.o���҂�������(chu��ng)������ln97xEndģ�K�����M(j��n)ȥ��
<!--[if !supportLists]-->3.2 <!--[endif]-->�������ļ�
�҂�Ҫ�ľ��gVxWorks�������^�ļ�Config.h�ж��x��һЩ����(sh��)��ʹ���g������ϵ�y(t��ng)����(d��o)�����VxWorks��ӳ������҂���Ҫ��ͬ�r߀Ҫ��sysLn97xEnd.c�@���ļ�����ʹϵ�y(t��ng)�ľW(w��ng)�j(lu��)���������\�С�
��1����λĿ䛵�C:\tornado2.2\target\config\pcPentium�����_ԓĿ���Config.h�ļ���
��2�����ҵ����xDEFAULT_BOOT_LINE��ĵط������A(y��)̎��l��CPU == PENTIUM��֧�µĶ��x���£�
#define DEFAULT_BOOT_LINE \
"lnPci(0,0)your_host_name:d:\\vxWorks h=193.168.80.169 e=193.168.80.254 u=target pw=vxworks tn=target"
����
lnPci(0,0)ָ����ʹ�õ�0���W(w��ng)���͵�0��̎������lnPci�@����(bi��o)�R�����ʹ�õ��(q��)�ӳ���ͬ��������ͬ�����@����lnPci�Ϳ����ˣ�
hostָ��������C(j��)�����֣�ʹ��host�Ϳ��ԣ�
d:\\vxWorksָ����VxWorksӳ�����d������·��(��������f��)��
h=193.168.80.169�������C(j��)��IP��ַ�����Ը���(j��)���H��r�ģ�
e=193.168.80.254��Ŀ��(bi��o)�C(j��)��IP��ַ�����Ը���(j��)���H��r�ģ�
u=targetָ����FTP����(w��)�����Ñ������@��FTP�����Á����dVxWorksӳ��ģ�����߀���ᵽ��
pw=target���Ñ�������(y��ng)�Ŀ��
tn=targetָ��Ŀ��(bi��o)�C(j��)�����֣�����ָ�����ɡ�
��3��ָ���W(w��ng)���(q��)�ӳ���
���Ȳ��ҡ�Network driver options���@�����֣�֮������Կ�����ԓעጺ��涨�x��һϵ�е����P(gu��n)�W(w��ng)���(q��)�ӵĺ궨�x��ע�Ᵽ�CINCLUDE_END��INCLUDE_LN_97X_END�@�ɂ���̎�ڶ��x��B(t��i)��define���������ĺ궼̎��δ���x��B(t��i)��undef��������
/* Network driver options */
#define INCLUDE_END /* Enhanced Network Driver Support */
#undef INCLUDE_DEC21X40_END /* (END) DEC 21��4x PCI interface */
#undef INCLUDE_EL_3C90X_END /* (END) 3Com Fast EtherLink XL PCI */
#undef INCLUDE_ELT_3C509_END /* (END) 3Com EtherLink III interface */
#undef INCLUDE_ENE_END /* (END) Eagle/Novell NE2000 interface */
#undef INCLUDE_FEI_END /* (END) Intel 8255[7/8/9] PCI interface */
#undef INCLUDE_GEI8254X_END /* (END) Intel 82543/82544 PCI interface */
#define INCLUDE_LN_97X_END /* (END) AMD 79C97x PCI interface */
#undef INCLUDE_ULTRA_END /* (END) SMC Elite16 Ultra interface */
#undef INCLUDE_BSD /* BSD / Netif Driver Support (Deprecated) */
#undef INCLUDE_EEX /* (BSD) Intel EtherExpress interface */
#undef INCLUDE_EEX32 /* (BSD) Intel EtherExpress flash 32 */
#undef INCLUDE_ELC /* (BSD) SMC Elite16 interface */
#undef INCLUDE_ESMC /* (BSD) SMC 91c9x Ethernet interface */
��4������PC_CONSOLE
ȱʡ��r�£�VxWorksϵ�y(t��ng)�Dz������ⲿݔ���O(sh��)�䣨���I�P����ݔ�룬Ҳ�����ⲿݔ���O(sh��)�䣨���@ʾ����ݔ����(sh��)��(j��)�����˱����{(di��o)ԇ���҂���횸�׃�����@�Nȱʡ��B(t��i)���҂����Ҷ�λ��INCLUDE_PC_CONSOLE��Ȼ���C��̎�ڶ��x��B(t��i)��define�����ɣ�����
#define INCLUDE_PC_CONSOLE /* PC keyboard and VGA console */
#ifdef INCLUDE_PC_CONSOLE
# define PC_CONSOLE (0) /* console number */
# define N_VIRTUAL_CONSOLES (2) /* shell / application */
#endif /* INCLUDE_PC_CONSOLE */
��5����sysLn97xEnd.c
���_C:\tornado2.2\target\config\pcPentiumĿ��µ�sysLn97xEnd.c�ļ����ȶ�λ����memory-mapped IO base���@�����֣�Ȼ����ǰ��ą���(sh��)��pciRsrc[endUnit].bar[1]�Ğ�NONE�����漴�ɣ�����
sprintf (paramStr, paramTemplate,
endUnit, /* END unit number */
NONE, /* memory-mapped IO base */
pciRsrc[endUnit].bar[0], /* IO address space base */
PCI2DRAM_BASE_ADRS, /* host PCI mem. base */
pciRsrc[endUnit].irqvec, /* IRQ vector */
pciRsrc[endUnit].irq, /* IRQ number */
LN97X_CSR3_VALUE, /* csr3 register value */
LN97X_OFFS_VALUE, /* offset */
LN97X_RSVD_FLAGS, /* flags (reserved) */
&ln97xStrDesc[typeIdx] /* device description */
);
<!--[if !supportLists]-->3.3 <!--[endif]-->���gBootrom��VxWorksӳ��
���gBootrom
���_Tornado�_�l(f��)���ߣ���Build�ˆ����x��Build Boot ROM���x��BSP��pcPentium��image��͞�bootrom�����ߞ�gnu����D8���c��OK��Bootrom�͕����g��
style='width:254.25pt;height:154.5pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D8 ���gbootrom
���gVxWorksӳ��
���g����bootrom��߀Ҫ��(chu��ng)��һ��VxWorksӳ��image����Ҳ����VxWorks����ϵ�y(t��ng)�����Ĵ��a�����E�飺
��1����(chu��ng)��һ����bootable VxWorks image���Ĺ��̣�BSP �x��pcPentium��
style='width:357.75pt;height:271.5pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D9 ��������pcPentium BSP��VxWorksӳ��
��2���x����Ҫ��VxWorks�M��
��D10�����@���������҂���Ҫ�����ɂ���Ҫ�ĽM����Telnet server �� Target shell��ǰ��ʹ�҂�����ͨ�^Telnet�f(xi��)�h��䛵�VxWorks����ϵ�y(t��ng)�У����߄t�����҂�ͨ�^�����п���VxWorksϵ�y(t��ng)�����⣬��Ҫ������C++���P(gu��n)���x헶������M(j��n)ȥ��
style='width:201.75pt;height:298.5pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D10 ����Telnet server��Target shell�M��
����x������_ʼ���g�������҂��ѽ�(j��ng)������VxWorks��ϵ�y(t��ng)����(d��o)������\�Еr�Ĵ��aӳ���@��߀Ҫ�����x�ߣ�����ÿ������ϵ�y(t��ng)��������Ϣ���磺config.h����Ҫ����(chu��ng)��һ�����́����gVxWorksӳ��������F(xi��n)���a��һ�µĆ��}�������ɵ����顰vxworks�����ļ�(���ㄓ(chu��ng)���Ĺ��̵�Ŀ���)��(f��)�Ƶ�D:\VxWorksĿ��¡��@��·�����������҂����O(sh��)�õ�DEFAULT_BOOT_LINE���е�·������(sh��)�Q���ģ���횱��ֶ���һ�¡�
<!--[if !supportLists]-->3.4 <!--[endif]-->��(chu��ng)������(d��o)ܛ�P
�F(xi��n)���_ʼ����VxWorksϵ�y(t��ng)����(d��o)�űP����������(d��o)�b�dVxWorks�\��ӳ��λĿ䛵�C:\tornado2.2\target\config\pcPentium���������ѽ�(j��ng)��ʽ���õ�ܛ�P��Ȼ���\�У�
mkboot a: bootrom
ԓ�����ܛ�P�Ͻ���VxWorksϵ�y(t��ng)����(d��o)�օ^(q��)����������(d��o)�����(f��)�Ƶ�ܛ�P�ϡ�
<!--[if !supportLists]-->4 <!--[endif]-->�����{(di��o)ԇ�h(hu��n)��
<!--[if !supportLists]-->4.1 <!--[endif]-->����FTP����(w��)��
�@���FTP����(w��)��������ϵ�y(t��ng)�ɹ�����(d��o)�����dVxWorks���\�Еrӳ���҂��@��ʹ��Tornado�_�l(f��)�h(hu��n)���Ԏ���FTP����(w��)����
��D11�����_Tornado FTP Server���x��Security���ˆ��µġ�Users/Rights���ӲˆΣ���(chu��ng)��User Name�顰target�����ġ�Home Directory����D:\VxWorksĿ䛣���·���������DEFAULT_BOOT_LINE����(sh��)�Q������ͬ�r�Ŀ���顰target��������c����Done�����o����ġ�
style='width:291.75pt;height:140.25pt'>
o:title="" />
<!--[if !vml]--><!--[endif]-->
�D11 ����FTP����(w��)��
���˱����{(di��o)ԇ���҂�߀Ҫ���_FTP Server����־���ܡ��x��Logging���ˆ��µġ�Logging Options���ӲˆΣ����г��ˡ�Winsock Calls���⣬�����x�ȫ��̎���_����B(t��i)��
����FTP Server����̎�ڴ��_��B(t��i)���@��FTP����(w��)����̎���\�Р�B(t��i)����
̓�M�C(j��)��ܛ�P���ӣ���������d����(w��)��D:\vxworksӳ����(w��)����FTP�������P(gu��n)��log����D12��
�D12 FTP����(w��)�� id="_x0000_s1026" type="#_x0000_t75" style='position:absolute;left:0;
text-align:left;margin-left:9pt;margin-top:1.8pt;width:415.5pt;height:286.5pt;
z-index:-1;mso-position-horizontal-relative:text;
mso-position-vertical-relative:text' wrapcoords="-39 0 -39 21543 21600 21543 21600 0 -39 0"
o:allowoverlap="f">
o:title="Snap1" />
1.�����ӡ���COLDFIRE5235��(f��)λ��CS0�xͨ�����醢���O(sh��)�䡣CPU�ĵ�ַ0�x��ɂ�LONG�֣���һ����SP����һ����PC��ֵ��������FLASHӳ���У�����ǰ��ɂ�LONG�ֱ�횴惦����(y��ng)ֵ������һ���͕rPCֵ��������һ�_ʼ�xֵ�r�ͽo��һ����FLASH�еĵ�ַ����0XFFE00008��Ҳ�����xһ���ԣ����ַ��ƫ�ƽoPC����0X00000008�����^�@���xֵ��Ԓ������ڽ����Ĵ��a����JUMP�Z���{(di��o)����0XFFE00000���ַ��FLASH���g��ȥ��
2.���{(di��o)ԇ�ֶΡ������_ʼ�\�Еr���]�������ֶΣ�����Ҫʹ��LED�c��������ʹ���Լ����x�Ĵ���ݔ������(sh��)���M(j��n)���{(di��o)ԇ�����^Ҫע����ǣ���VXWORKS�г�ʼ�����ں�ע�⿼�]�Լ����x�Ĵ��ں���(sh��)��ϵ�y(t��ng)֮�g�ě_ͻ��
]]>ժҪ S3C44BOX�̶����Д����ģʽ�cVxWorks�Į���̎��C(j��)�ƴ������_ͻ�����ķ���VxWorks�Į���̎��C(j��)�ƺ�,���һ�N��Q����,���F(xi��n)VxWorks��S3C44BOX�ϵ�BSP���ơ�ԓ��������VxWorksԭ�е��Д�̎��C(j��)��,�Ķ����CVxWorks��ֲ��ķ�(w��n)���ԺͿɿ��ԡ�
�P(gu��n)�I�~ VxWorks S3C44BoX BSP �Д�̎��C(j��)��
�� ��
VxWorks�ǬF(xi��n)�����Ъ�����̎�����Č��rϵ�y(t��ng)�������ɫ�IJ���ϵ�y(t��ng)֮һ����֧�ֵ�CPU������PowerPC��x86��MIPS��ARM��,����(n��i)��Wind�����΄�(w��)���ГQ�r�g�̡��Д����tС���W(w��ng)�j(lu��)����������c,��һ�������^�����ܵĘ�(bi��o)��(zh��n)Ƕ��ʽ���r����ϵ�y(t��ng)������,VxWorks����ϵ�y(t��ng)߀�����^�õĿɲÜp�Ժ�������ֲ�����c��
S3C44BOX���n��Samsung��˾��Ʒ��һ��A(y��)RM(Advanced RISC Machines)������,CPU���Ğ�ARM7TDMI��S3C44BOX���зdz��S��������YԴ,����LCD��������12C������������I2S������������2��������������2��ͨ��DMA(Direct Memory Access)��������8��10λADC(Analog to Digital Converter)ͨ����71��ͨ��I��O���_��,���p����ϵ�y(t��ng)�ɱ�,�Ǹ��N�W(xu��)��(x��)����_�l(f��)������xARMоƬ��
1 BSP����
BSP(Board Support Packet,�弉֧�ְ�)�ǽ��ڵ�Ӳ�����ό�ܛ��֮�g�ĵ�ܛ���_�l(f��)��,������Ҫ����������Ӳ��,�ṩ����ϵ�y(t��ng)���(q��)����Ӳ�����(q��)��,���w���ܰ�����
��Ŀ��(bi��o)�C(j��)Ӳ����ʼ��,��Ҫ��CPU�ij�ʼ��,������ܛ��ϵ�y(t��ng)�ṩ��Ӳ��֧��;
�������ϵ�y(t��ng)�ṩ�O(sh��)���(q��)��������ϵ�y(t��ng)�Д����(w��)����;
�����Ʋ���ϵ�y(t��ng)�Ĺ���,��ܛ��ϵ�y(t��ng)�ṩһ�����r���΄�(w��)���\�Эh(hu��n)����
2 VxWorks��������
VxWorks�Ć����漰���ɂ�ӳ���ļ���Bootromӳ���VxWorksӳ��,����ÿһ��ֿ����ټ�(x��)�֞鉺�s���lj��s���v��ROM�ͷ��v��ROM��͵�ӳ��ͬ��ӳ��(y��ng)�Ć�������Ҳ������ͬ,�������Ļ�����������ͬ��,���1���С�
PCLlNT RTN *pRtn��
for (pRm = (PCI_INT_RTN*)DLL_FIRST(&pcilntList[irq])��
pRtn!=NULL��
pRtn =(PCI_INT_RTN*)DLL_NEXT(&pRtn->node))
(*pRtn->routine)(pRtn->parameter)��
}
��(d��ng)PCI���������Д�l(f��)���r��ϵ�y(t��ng)�{(di��o)��void pcilnt(int irq)����(sh��)������pciIntʹ�Ã�(n��i)����朱�������{(di��o)�Ò���ԓ�Д��ϵ�ISR�����ij��ISR���������˳����͕�Ӱ푵�����ISR���\�С����{(di��o)ԇ�r���˙z���Д������Ƿ��ѽ�(j��ng)��ISR�ɿ����B���ϣ��������������ϻ������ֱ���{(di��o)��pciInt���鿴ISR�Ƿ��|�l(f��)����Ӳ���_������r�£�����С���O(sh��)Ӌ���C����Ӳ��ʹ�ò�ͬ���Д࣬�@�ӌ�PCI�ϵ��O(sh��)��Ҳ��ֱ��ʹ��intConnect����Дࡣ
��Ҫ�f������ISR�����Д��������^�̲��Ǻ��ε������������O(sh��)���Д�����ֵ��VxWorks�����O(sh��)���Д�����ֵ���⣬߀���c�Д��������B��ISR������һ�ӱ����İ��b������IsR��(zh��)��ǰ����Ĵ���ֵ���O(sh��)�öї��Լ�IsR��(zh��)�к�֏�(f��)�Ĵ����Ͷї������Д��l���Ĉ��ϣ�ϵ�y(t��ng)���Д�ї��п��ܱ��ıM����������˱���������r�l(f��)���������ϵ�y(t��ng)���Д�ї���С������config.h�м������´��a��
#define INCLUDE_KERNEL
#define ISR_STACK_SIZE 0xl000 //��ʾϵ�y(t��ng)���Д�ї��Ĵ�С��4k
�����Д�̎������������ԣ��Д�̎�������в���ʹ�ÿ��܌�(d��o)�������ĺ���(sh��)����printf��semTake�ȣ����w����ʹ�õĺ���(sh��)�б�������<<VxWoks Programmer Guide>>�в鵽���Еr������{(di��o)ԇ���㣬ϣ����ISR�д�ӡһЩ��Ϣ��ϵ�y(t��ng)�ṩ��һ���cprinf�ȃr�ĺ���(sh��)sysLog��ԓ����(sh��)�ɽ���7������(sh��)�����Ƿ������ġ����^���ԣ�prinf����(sh��)Ҫ�ڴ�ӡ�΄�(w��)��ɺ�ŷ��أ�sysLogֻ�Ѵ�ӡ�΄�(w��)�ŵ�ϵ�y(t��ng)�Ĵ�ӡ����оͷ��ء���ISR���mȻ������ʹ��semTake��������ʹ��semGive(������͵ij���)��һ��ʹ��semTake��semGive��ISR����ͨ�����gͨ�ţ���(d��ng)һ���Д�a(ch��n)����ISR ��ɱ�Ҫ���΄�(w��)���{(di��o)��semGive֪ͨ����һ��ʹ��semTake�ȴ�ISR��̖���΄�(w��)��ԓ�΄�(w��)�յ�semGiveጷŵ���̖���^�m(x��)���ISR�в���̎�����΄�(w��)�� ]]>
1.���x��Board Support Package, Provides VxWorks with primary interface to hardware environment��
2.���ã�
��ͨ늺�,��ʼ��Ӳ����
֧��VxWorks��Ӳ���(q��)��ͨ�ţ�
ʹhardware-dependent �� hardware-independent��VxWorksϵ�y(t��ng)�кܺõĽY(ji��)�ϣ�
�����_�l(f��)BSP��Ҫ�ă��c:
ϵ�y(t��ng)image������,image�ķN�,image��download���d�^��,ϵ�y(t��ng)�Ć��������^��,�{(di��o)ԇ�h(hu��n)�������ü��h(yu��n)���{(di��o)ԇ�ķ�ʽ�ͷ���,����(y��ng)BSP�O(sh��)���ļ�����(�W(w��ng)�j(lu��),����... )��BSP���ļ��ĽM�ɺ����á�
Ҫ��ϵ�y(t��ng)���(q��)�����,Ҳ���nj�CPU�����P(gu��n)��Ӳ�������˽�.��Ҫ��32̎����(��늆����^��, download image�ķ�ʽ����,�x��ROM,��ַ���g����,MMU,�Ĵ���,�Дඨ�x,..).����Ӳ���Y��,���xһЩԴ�a����������.
�����ɂ���Ҫ�ɂ��f(xi��)�h��
WTX�f(xi��)�h(Wind River Tool eXchange): �����_�l(f��)�C(j��)��(n��i)��Tornado�����cTarget Server֮�gͨ��.
WDB�f(xi��)�h(Wind DeBug): �������C(j��)Target Server�cĿ��(bi��o)�C(j��)֮�g��ͨ��.
�ģ���ҪBSP��Ҫ�ļ�Ŀ䛵ĽM�ɼ���Ҫ�ļ�������:
1.Ŀ�target/config/All:
�@��Ŀ��µ��ļ�������BSP�ļ�������,�����e��Ҫ��Ҫ����������κ��ļ�.
a. configAll.h:
ȱʡ���x������VxWorks���O(sh��)��.�������ȱʡ���O(sh��)��,����BSPĿ��µ�config.h�ļ�����#define��#undef��ʽ�������O(sh��)��.
b. bootInit.c:
��romInit.s��,���Boot ROM�ĵڶ�����ʼ��.�����romInit.s�е�romInit()�����@���ļ��е�romStart().���(zh��)�б�Ҫ�Ľ≺��ROM image�ķ���.
c. bootConfig.c: ���Boot ROM image�ij�ʼ���Ϳ���.
d. usrConfig.c: VxWorks image�ij�ʼ�����a.
2.Ŀ�target/config/comps/src:
�漰ϵ�y(t��ng)���ĵ�components,��Ҫ��target/config/All��usrConfig.c�к���(sh��)�{(di��o)��.
3.Ŀ�target/config/bspname:
����ϵ�y(t��ng)��Ӳ�����P(gu��n)��BSP�ļ�.
a. Makefile һЩ�����п���images�����ɡ�
b. README BSP�l(f��)���o(j��)�,�汾,�����ęn
c. config.h ���������漰CPU������O(sh��)�ü����x(includes,definations),��Ҋ BSP�O(sh��)���ļ����������d
d. configNet.h �W(w��ng)�j(lu��)�(q��)�ӵ���Ҫ�O(sh��)���ļ�,��Ҫ��END�(q��)���O(sh��)��.
e. romInit.s �R���Z���ļ�,��VxWorks Boot ROM��ROM based image�����,��Ҋ ϵ�y(t��ng)���Ӳ���
f. sysALib.s �R���Z���ļ�,����T�����Լ��ąR������(sh��)�����@���ļ���,���ό��{(di��o)��.VxWorks image������c_sysInit���@���ļ���,����RAM�Ј�(zh��)�еĵ�һ������(sh��).
g. sysLib.c ����һЩϵ�y(t��ng)���P(gu��n)�ĺ���(sh��)����,�ṩ��һ��board-level�Ľӿ�,VxWorks�͑�(y��ng)�ó��������system-indepent�ķ�ʽ����.�@���ļ�߀�ܰ���Ŀ�target/config/comps/src���(q��)��.
h. sysScsi.c ���x�ļ�����Scsi�O(sh��)���O(sh��)�úͳ�ʼ��.
i. sysSerial.c ���x�ļ��������еĴ����O(sh��)�úͳ�ʼ��.
j. bootrom.hex SIC�ļ�����VxWorks Boot ROM���a
k. VxWorks �\����Ŀ��(bi��o)�C(j��)��,������,�B�Y(ji��)���VxWorks���M(j��n)���ļ�.
l. VxWorks.sym ��ȫ��,�B�Y(ji��)���з�̖����VxWorks���M(j��n)���ļ�
m. VxWorks.st ��ȫ��,�B�Y(ji��)��,standalone,���з�̖����VxWorks���M(j��n)���ļ�
ע��
BSP��"make"�����g�B������(Created),��������Tornado����.
BSP�͑�(y��ng)�ó�������"make"��"tornade"���_�l(f��)(developed)
BSP���O(sh��)�������(q��)��:
�Д����interrupt controller,Ӌ�r��timer(sys/aux),����UART(serial),�@ʾ��LCD,�I�PKeyboard(opt),�|����touch-screen(opt)��
һ��VxWorks Image�ķN�:
BSPĬ�J(r��n)��download VxWorks RAM image��ʽ�Ǐ�Ethernet. ������|��Ҫ�Á����_�l(f��)��(COM1)ͨ��,ͨ�^�f(xi��)�hWDB.
�ɼ��d��ӳ��( Loadable images) �ɷ֞飺
1.ROM-based images����-compressed/uncompressed(ֻҪһ��ӳ��)��
2.ROM-Resident images(BootRom + VxWorks Image ģʽ)��
BootRom�П�䛵�ӳ��
VxWorks boot images����-A VxWorks image designed to load another VxWorks images containing application code (often refer to as "boot code") ,"Burned" into ROM or loaded into Flash,Maybe execute in ROM/Flash (ROM-resident),Maybe execute out of RAM.
VxWorksӳ��(�����Ñ�����) ��
VxWorks images����-A VxWorks image containing "end-user" code,
VxWorksӳ���ַ֞������:
1.Loadable VxWorks image����VxWorks images loaded by VxWorks boot image.
2.VxWorks ROM image����VxWorks image "burned" into ROM or loaded into Flash.May execute in Flash.
VxWorks Image�ļ���͵��f��
1.Uploaded images��ͨ�^�W(w��ng)�ڻ����d��RAM��:
vxWorks - basic Tornado, shell �� symbol table �����C(j��)��
vxWorks.st���ļ��ܴ�- ������ image,����shell�� symbol table��Ŀ��(bi��o)���\��
2.ROM based images(ֱ�ӟ���ROM��VxWorks):
vxWorks_rom - Tornado in ROM,�lj��s, �� RAM ���\��
vxWorks.res_rom_nosym - Tornado in ROM, �lj��s,�� ROM ���\��
vxWorks.st_rom - Stand-alone in ROM, ���s, RAM ���\��
vxWorks.res_rom - Stand-alone in ROM, �lj��s, ROM ���\��
VxWorksӳ�������(sh��)��(j��)�ͳ���ɂ�����
VxWorks images consist of:
1.Text segment����-executable instruction.
2.Data segment����-Initilized global and static varibles.
��BSP make�ļ��а���:
include $(TGT_DIR)/h/make/rules.library
include $(TGT_DIR)/h/make/defs.default(define default value for makefile)
...............
BSP make�ļ��а���: include $(TGT_DIR)/h/make/rules.bsp ...
һ��ϵ�y(t��ng)�������
VxWorks image
�֞���ROM���\�к���RAM���\�ЃɷN.���߆������ą^(q��)�e����sysInit()����(sh��)���{(di��o)��.ԓ����(sh��)��RAM�\�е�VxWorks�г�ʼ��RAM��
1.ROM���\�е�VxWorks ��
VxWorks��ROM���\��,������ROM�е�VxWorks�Ƿlj��s��,����Ҫ�≺,ϵ�y(t��ng)ֱ������ROM����ַ,�\��VxWorks.ע��:ROM�\�е�VxWorks����֧�����е�����,��(y��ng)�������փԞ��(zh��n).
1.1��(zh��)�����
romInit.s��romInit()����>bootInit.c��romStart()����>usrConfig.c�е�usrInit()����>sysHwInit()����>usrKernelInit()����>KernelInit(usrRoot,...)
1.2��(y��u)�c
VxWorks��ROM���\����Ҫ�Ǟ��˹�(ji��)ʡRAM���g,�Ա㑪(y��ng)�ó����и���Ŀ��g�\��.ֻ��VxWorks image��data�Ώ�(f��)�Ƶ�RAM��LOCAL_LOW_ADRS, text��������ROM����ROM�Ј�(zh��)��.
1.3ȱ�c
ROM���\�е�VxWorksȱ�c���\���ٶ���.
2. RAM���\�е�VxWorks
VxWorks��RAM���\��,������ROM�е�Boot��VxWorks Image�lj��s��,��Ҫ�Ƚ≺copy���е�text��data��RAM��LOCAL_LOW_ADRS��,����sysInit()��Ҫ�dz�ʼ��RAM�õ�,ϵ�y(t��ng)ֱ������RAM����ַ,�\��VxWorks��usrInit()ǰ�治���s,��romInit(),romStart()���܉��s.
2.1�����(zh��)�����
romInit.s�е�romInit()����>bootInit.c�е�romStart()����>sysaLib.s�е�sysInit()����>usrConfig.c�е�usrInit()����>sysHwInit()����>usrKernelInit()
����>KernelInit(usrRoot,...)
Boot��VxWorks image��text�λ�data�Ε���ROM��(f��)�Ƶ�RAM,��RAM���\�С�����usrRoot()��VxWorks���ӵĵ�һ���΄�(w��),��������ʼ�� driver,network������: romInit.s first execute in flash,minal initiliz,then jump to romStart.romStart() �_ʼ�b�d�ͽ≺image��RAM,sysaLib.s����RAM�Ј�(zh��)�еĵ�һ������(sh��).
BootROM image
BootROM image ���ٵ�ϵ�y(t��ng)��ʼ��,��Ҫ���چ����b�dVxWorks image.һ���Љ��s�Ͳ����s�ɷN��ʽ,��bootrom��boot_uncmp.�cVxWorks image�ą^(q��)�e����һ��Bootrom�{(di��o)��bootConfig.c,��VxWorks�{(di��o)��usrConfig.c.
1.1�����(zh��)�����
romInit.s�е�romInit()����>bootInit.c�е�romStart()����>�ļ�bootConfig.c�е�usrInit()����>sysHwInit()����>usrKernelInit()
����>KernelInit(usrRoot,...)
���� /target/config/all/bootConfig.c��Boot ROM�O(sh��)��ģ�K.����ͨ�^�W(w��ng)�j(lu��)���dVxWorks image.
usrRoot()����>bootCmdLoop(void)�������x��,��autobooting
����>bootLoad(pLine, &entry)���dģ�K����(n��i)��(�W(w��ng)�j(lu��),TFFS,TSFS...)
����>netifAttach()����>go(entry)����>(entry)()������_ʼ��(zh��)��,������.
1.2��������(sh��)����Ҫ����
romInit() power up,disable interrupt,put boot type on the stack,clears caches.
romStart() load Image Segments into RAM.
usrInit() Interrupt lock out,save imformation about boot type,handle all the Initialization before the kernel is actually started,then starts the kernel execution to create an initial task usrRoot().This task completes the start up.
sysHwInit() Interrupt locked,Initializeshardware,registers,
activation kernel
KernelInit(usrRoot,...)
Initializes and starts the kernel.
Defines system memory partition.
Activates a task tUsrRoot to complete initalization.
Unlocks inierrupts.
Uses usrInit()stack.
usrRoot() ��ʼ����(n��i)��օ^(q��)��(memory partition library)
��ʼ��ϵ�y(t��ng)ϵ�y(t��ng)�r�(system clock)
��ʼ��ݔ��ݔ��ϵ�y(t��ng)(I/O system)�����������x
Create devices�����������x
�O(sh��)�þW(w��ng)�j(lu��)(Configure network)�������������������x
����WDBĿ��(bi��o)ͨ��(Activate WDB agent)����������������-���x
�{(di��o)��(Activate application)
VxWorks ��ROM���r
ROM �͵�ַλ��]�Љ��s��romInit.s��romStart()��ROM����ʼλ��,ϵ�y(t��ng)power up��,���@����ʼλ�_ʼ��(zh��)��,����(zh��)��romInit(),��ʼλ����Ӳ�����x,һ���0x00000000��ROM �ߵ�ַλ�鉺�s��VxWorks Imgage
���� RAM_LOW_ADRS, RAM_HIGH_ADRS ��һЩ��ַ��makefile ��BSP config.h�ж��x��
]]>
%A VxWorks���r����ϵ�y(t��ng)��BSP
%A ����ξ ���_��W(xu��) ������ �m���� �� ƽ ����W(xu��)
%A ժҪ���н�B���r����ϵ�y(t��ng)V Works��BSP�ĸ���Լ��_�l(f��)BSP���Ҫ�˽�Ľ����{(di��o)ԇ�h(hu��n)����ϵ�y(t��ng)�Ć����^
%A �̡�V works Image�ķ���Լ�BSP�ļ��ĽM�ɵȃ�(n��i)�ݡ�
%A �P(gu��n)�I�~ VxWorks lISP
%A The Concept of BSP in VxWorks
%A DiI1g Dawei Wang Jingang Gong Xiaolin Jiang Ping
%A Abstract In this paper��the concept of BSP in VxWorks��a real�Dtime operating system are presented�� It also described
%A the cross debug environment��the boot process of the system��the sorts of VxWorks Image and the composition of BSP files��
%A Keywords VxWorks BSP
%A 1 BSP
%A Vxworks����ϵ�y(t��ng)��һ�NǶ��ʽ���r����ϵ
%A �y(t��ng)(RTOS)����������(n��i)�˵ĽY(ji��)��(g��u)�������\����
%A Ŀǰ�����е�CPU �ϣ�����intel x86��Power
%A PC��ARM��MIPS�ȣ� ��ǰ���DZ��������(y��ng)��
%A BSP (��O֧�ְ�)֧�֡�BSP�������cӲ�����P(gu��n)
%A �Ĺ��ܺ���(sh��)���ṩVxworks�cӲ��֮�g�Ľӿڣ�
%A ����BSP����ͬ��Ӳ���(q��)�ӡ�
%A BSP��Ҫ���Ӳ����ʼ��������ϵ�y(t��ng)��늕r
%A ���ض�λ���ṩ�˿ڴ��a����ʼ���惦�����P(gu��n)��
%A �࣬��VxWorks���d��RAM �^(q��)�ȣ� ֧��Vx�D
%A Works�cӲ���(q��)�ӵ�ͨ�š���ЩӲ���(q��)������Ҫ
%A ��BSP֧�ֵģ�����Ӳ���(q��)�Ӷ��x�����Д����(w��)��
%A ��(ISR)����BSP�팢��ISR�B�ӵ��Д���������
%A �������cӲ����ܛ�����cӲ�����P(gu��n)��ܛ����Vx�D
%A Worksϵ�y(t��ng)�кܺõؽY(ji��)��������
%A 2 BSP�_�l(f��)
%A ��BSP�_�l(f��)����(y��ng)���Ƚ���Tornado�_�l(f��)�h(hu��n)����
%A ����(j��)���w��r����VxWorks�M���������x����m
%A ��BSPģ�壬������(y��ng)���ļ��M(j��n)���ģ��������
%A �Լ����O(sh��)���(q��)�ӳ����M(j��n)�з�����{(di��o)ԇ��
%A Tornado 2��2�����{(di��o)ԇ�h(hu��n)��Ƕ��ʽ����ϵ�y(t��ng)
%A ���{(di��o)ԇ�h(hu��n)�����c�������ϵ�y(t��ng)�������@�ą^(q��)�e����
%A �ַQ�齻���{(di��o)ԇ�����Tornado�_�l(f��)�h(hu��n)���ǻ���
%A �ܘ�(g��u)�ģ������x��ĕr��Ҫ����(j��)�Լ���̎������(n��i)��
%A �x����m�İ汾������҂�ʹ�õ�̎����
%A S3CA510B���õ���ARM �ˣ� �����҂��x��Tor�D
%A nado2��2 for ARM ���@�ͱ��C��ʹ�õ��_�l(f��)�h(hu��n)����
%A ��������Ҫ���_�l(f��)�����Լ�ͬ�BSP����ģ�塣
%A ? ��target��eonfig��all��eonfigAl1��h�������
%A ��VxWorks�M���x헣� ������32���Ќ��@Щ�M��
%A �M(j��n)�����ӻ��߄h����
%A �x��BSPģ�岢������(y��ng)�ļ��M(j��n)���� Vx-
%A Works�İ弉֧�ְ�BSP�ṩ��VxworksͬӲ��
%A �h(hu��n)���Ļ����ӿڽ��棬֧��Ӳ���(q��)�ӵ��L������
%A Vxworks��Ӳ�����P(gu��n)��Ӳ���o�P(gu��n)��ܛ�����ɵ�һ
%A �w���书���ஔ(d��ng)��PC�C(j��)��BIOS��������Դ�ļ���
%A �^�ļ���make�ļ�����(d��o)���ļ��Ͷ��M(j��n)�Ƶ��(q��)��ģ
%A �K��
%A BSP��Ҫ��CԴ�ļ��ͅR���ļ��M�ɣ�BSP
%A ���_�l(f��)���ԏ�WindRiver��˾�ṩ��BSPģ���_
%A ʼ���ڴ˻��A(ch��)��������(y��ng)���ġ���Ҫ��Ҫ������
%A ��������ģ�
%A �� eonfig��h
%A VxWorks��ȱʡ������eonfigAl1��h�_���� ��
%A ����Ҫ�����Լ�����Ҫ���Č�eonfig��h�����O(sh��)�ô�
%A ���^(q��)�Ĵ�С�������µij���ģ�K���h������Ҫ��ģ
%A �K�ȡ�
%A �� makefile
%A ����������VxWorks��ӳ���ļ�����ͣ���
%A ����߀�����惦�^(q��)��С����Ϣ�����������ӵij���
%A ģ�K�����makefile��ʹ��MACH �DEXTRA ��
%A ���Ŀ��(bi��o)ģ�K���뵽��K��VxWorksӳ���ļ�
%A �С�
%A �� ���ƌ��ýӿ��(q��)�ӳ���
%A VxWorks��ȱʡ�����ṩ��ͨ�ýӿڵ��(q��)��
%A �����Dz���һ���m���Ñ����w��Ӳ���h(hu��n)������
%A ���Ñ���Ҫʹ��ar-d����@Щģ�K�Ď��ļ���
%A �h����Ȼ����Դ�����(f��)�Ƶ��Ñ���BSP Ŀ���
%A �M(j��n)���ģ�����makefile��ʹ��MACH�DEXTRA
%A �����Ŀ��(bi��o)ģ�K���뵽��K��Vxworksӳ����
%A ����
%A �S���YӍ
 http://www.cqvip.com
http://www.cqvip.com
%A �� �����g(sh��)?2005���һ�� 69
%A VxWorks Image�ķ�� VxWorks Image��
%A �Է֞����ROM-based Image(���s��lj��s)��
%A ROM -Resident Image�� Loadable Image
%A ��
%A VxWorks Image��Text�Ρ�Data�κ�BSS
%A �νM�ɣ�Text���ǿɈ�(zh��)�д��a�Σ�Data���ѳ�ʼ
%A ����ȫ��׃�����o�B(t��i)׃����BSS����δ��ʼ��ȫ��
%A ׃�����o�B(t��i)׃����
%A ���ڲ�ͬ��Vxworks Image�����Ӳ��EҲ��
%A һ�ӡ����������NImage����һ������ͬ�ģ�����
%A ̎��������ijһ�ض���ַ�� �_ʼ��(zh��)�І��Ӵ��a
%A (BootStrap)�������������ͬ�Ĺ��ܣ��P(gu��n)�]�Д࣬
%A ��ʼ��Ŀ��(bi��o)�惦�����b�dҪ�\�е�VxWorks Im�D
%A age�ε�RAM �С�
%A RoM�DResident Image�cROM-based Image��
%A �NImage�������ڮa(ch��n)Ʒ�A�Σ� ��ֱ�ӟ�䛵�ROM
%A �С����_�l(f��)�{(di��o)ԇ�A�Σ� �@�ɷNImage������Ҫ�l
%A ���ğ���RoM ���Էdz������㡣
%A Loadable
%A Image ��λ
%A �����C(j��)�ϵ�
%A ���M(j��n)���ļ���
%A �ɟ����Ŀ
%A ��(bi��o)��RoM
%A �е�boot�D
%A RoM Image
%A LoCAL MEM
%A LoCAL ADRS
%A RAM LOW
%A ADRS
%A FREE RAM
%A ADRS
%A RAM HIGH
%A ADRS
%A ��������C(j��)
%A ���d��Ŀ��(bi��o) �D1 Loadable Image�����d�^��
%A ���RAM
%A �С����H�ϣ�boot�DRoM Image��һ���߶ȲÜp��
%A ��СVxworksϵ�y(t��ng)������Ψһ���þ��nj��F(xi��n)Ŀ��(bi��o)
%A �C(j��)�c���C(j��)ͨ�ţ���λ�����C(j��)Ӳ�P�ϵ�loadable Im�D
%A age���d��Ŀ��(bi��o)��RAM �У� ��(zh��)����r��D1����
%A �Ȉ�(zh��)��BootStrap��Bo otStrap����������Ӳ����
%A ʼ�������� ����boot�DRoM Image��ؐ��RAM �D
%A H IGH
%A �D ADRS̎�_ʼ��(zh��)�У������C(j��)��ָ��λ�õ�
%A Loadable Image���d��RAM �DLOW �DADRS̎��
%A Ȼ���ɴ�Image���ӹ�Ŀ��(bi��o)�壬Bo ot Program ��
%A ���ʹ��������ռ�õ�RAM �^(q��)��ϵ�y(t��ng)���գ�����
%A ϵ�y(t��ng)��(n��i)��ص�һ���֡����⣬boot�DRoM ImageҲ
%A �����lj��s�ģ� �ڿ�ؐ��RAM �DHIGH �DADRS
%A �r�M(j��n)�н≺��Ҳ�����v����ROM �Ј�(zh��)�У���ֻ��
%A ����Data�κ�BSS�ο�ؐ��RAM �DHIGH �D
%A ADRS̎��
%A ϵ�y(t��ng)������� ����ROM-based Image��
%A ROM-Resident Image���䆢��������£�
%A rom Init () һrom Start () һsysInit ()
%A usrInit () ��_+Kernellnit (usrRoot�� ? ? )
%A ������(sh��)���������£�
%A romInit()���P(gu��n)�]�Д࣬ ���M���ٵ�Ӳ����ʼ
%A ����ʹC��������\�С�
%A romStart()�� ��Vxworks Image��ؐ��
%A RAM �У������Ҫ�t�M(j��n)�н≺�s�������ROMResident
%A Image�� �tֻ��ؐData�κ�BSS�Ρ�
%A sysInit()����ʼ��ϵ�y(t��ng)�Д࣬ �������мĴ�
%A ���Þ���֪��B(t��i)�� ����������Дࡣ
%A usrInit()�����ļ�usrConfig��c�У����ϵ�y(t��ng)
%A ��(n��i)���\��ǰ��Ҫ��ɵ����г�ʼ����������ʼ��
%A cache��BsS�����㡢��ʼ���Д������ȡ�
%A Kernellnit()����ʼ�������Ӷ��΄�(w��)��(n��i)�ˣ��_
%A �Д࣬��(chu��ng)��һ�����΄�(w��)usrRoot��
%A usrRoot()�� ��ʼ��I��O ϵ�y(t��ng)����ʼ��ϵ�y(t��ng)�r
%A 犣���(chu��ng)���O(sh��)�䣬���b�(q��)�ӣ���ʼ���W(w��ng)�j(lu��)���{(di��o)���Ñ�
%A ��(y��ng)��
%A �(q��)�ӳ�����_�l(f��) �cBSP�_�l(f��)���߰�һ��l(f��)
%A ����ܛ���а����˸��N����(q��)�ӳ����ģ�壬�@Щ
%A ģ���ṩ�������(q��)�ӳ����õ�߉�Y(ji��)��(g��u)���O(sh��)Ӌ�(q��)
%A �ӳ���rһ�㑪(y��ng)ԓ���Տ��ϵ��µ��������Ɍ�
%A �(q��)�ӳ����Ӌ�����Լ������γ����ɺ���(sh��)�͔�(sh��)��(j��)�Y(ji��)
%A ��(g��u)��(g��u)�ɵĹǼ�֮�� �Ϳ����_ʼ��(zh��n)���(zh��)�к͜yԇ
%A �ˡ��@���ֹ������^��(f��)�s����Ҫ�����������a���y
%A ԇ���{(di��o)ԇ�����¾��g�����ܜyԇ�Ȏׂ����E��Ո�x
%A �߅�Ҋ�����Y��l_1]��
%A �����Y��
%A 1 W ind River Systems�� Inc�� VxWorks BSP Developer s
%A Guide��5��5��Edition 1��DOC-14695һND-00��U & A
%A 2002��
%A 2 Wind River Systems�� Inc�� VxWorks Programmer��s
%A Guide��5��5��Ed ition 1��1��)O(2-14617һZD00��U�� & A
%A 2002��
%A 3 ���� �ݣ���������Ƕ��ʽܛ���_�l(f��)���g(sh��)����
%A �����������I(y��)�����磬2003
%A �������Z �� �Z �Z �Z���Z �Z �Z���Z �Z���Z���Z �Z �Z �Z �Z �Z���Z �Z
%A ��
%A �� ��
%A � ���͔�(sh��)��(j��)�ɼ��ijɱ� �n
%A �� ��
%A �� ͨ�^�Ƴ�Mϵ��DAQ�a(ch��n)Ʒ��NI��˾��ÿ
%A ����ڔU(ku��)չ��(sh��)��(j��)�ɼ����ܵ�ͬ�r�����O(sh��)��ij�jc
%A ���������H�ϣ��M��Mϵ�Юa(ch��n)Ʒ����(qi��ng)��I��O�ĊZ
%A ���ܣ����^ͬ�rÿ��I��0ͨ���ijɱ�Ҳ����jc
%A ϲ��30 9��6��Mϵ�Юa(ch��n)Ʒ��������ǰDAQ�a(ch��n)Ʒ��
%A �������߂��NI-STC 2��NI�DMCal��NI�DPGIA X
%A �����g(sh��)����߀�ܺ�NI LabVIEW ��NI�DDAQmx��
%A ���y������(w��)ܛ���o�p�ؼ��ɣ��Ķ����и��õ���
%A ���ܡ����ߵărֵ���ṩ�����I��0��
%A �� �Z���Z���Z���Z���Z���Z���Z���Z���Z���Z���Z���Z�����������Z���Z���Z���Z������{-��{-��???��һ���Zt}
%A �S���YӍ
http://www.cqvip.com[�P(gu��n)�I�~] PC104������VxWorks�������_�l(f��)�h(hu��n)��Tornado�����d֧�ְ�BSP
1 ����
VxWorks����������WindRiver�Ƴ���һ�NǶ��ʽ��(qi��ng)���r����ϵ�y(t��ng)�������ڶ��΄�(w��)�{(di��o)�ȵķ�ʽ�����Թ����������O(sh��)���������ɸ���(j��)��(y��ng)�ó����������ϵ�y(t��ng)�M(j��n)�вü������̶ȵĉ��s���a�����F(xi��n)����ă�(y��u)����
Intelx86ϵ��̎������Ƕ��ʽ��(y��ng)��һ������PC104����ʽ���F(xi��n)�ģ�PC104������PC/AT�����И�(bi��o)��(zh��n)�����⣬����CPUģ�K߀��һЩ���صă�(y��u)�c���_�l(f��)���ڶ̡��M�õ͡��w�eС���ӯB�B�ӡ�����С��ģ�K�������_��������������(qi��ng)���������惦�ضȷ����������ɶȸߣ��ɿ��Ըߡ�
��PC/104�����O(sh��)����ʹ�õĔ�(sh��)��(j��)�惦�O(sh��)��ͨ����Ӳ�P�ͻ����W�漼�g(sh��)�Ĺ̑B(t��i)��ӱP������Ƕ��ʽϵ�y(t��ng)�����h(hu��n)��һ����^���ӣ�Ӳ�P�ڐ��ӵ����ӗl���o���������������̑B(t��i)��ӱP�Ĺ��������܌��������x������(y��ng)�h(hu��n)���µ�����(����40�浽����85��)�������w�e��С���m��Ƕ��ʽ��(y��ng)�á���Ƕ��ʽϵ�y(t��ng)�Д�(sh��)��(j��)�惦�O(sh��)�������CE��˾��CF(CompactFlash)�������ڴ�ܛӲ��ƽ�_���O(sh��)Ӌ�_�l(f��)��Ƕ��ʽ���r����ϵ�y(t��ng)VxWorks�IJ�����PC104�����İ��d֧�ְ���
2 VxWorks���d֧�ְ�BSP�O(sh��)Ӌ
2.1 ����PC104�����O(sh��)���VxWorks����ϵ�y(t��ng)ӳ���_�l(f��)
�ڌ��r����ϵ�y(t��ng)VxWorks�У�Ӳ������������d֧�ְ�BSP����ʽ���F(xi��n)�ġ�ᘌ���ͬ��̎�����wϵ�Y(ji��)��(g��u)�Լ�Ӳ���h(hu��n)���O(sh��)Ӌ��ͬ�İ��d֧�ְ������r����ϵ�y(t��ng)VxWorks�Ϳ������ڲ�ͬ��Ӳ���h(hu��n)�������p�����YԴ���M�������d֧�ְ�ͬ�r����Ӳ�����P(gu��n)�ԺͲ���ϵ�y(t��ng)���P(gu��n)�ԣ���һ������Ӳ���cܛ��֮�g��ܛ���ӴΣ�������ϵ�y(t��ng)�еĴ��cӲ�����P(gu��n)��ܛ��ģ�K��VxWorks���d֧�ְ�BSP���O(sh��)Ӌ����ʹǶ��ʽ���r����ϵ�y(t��ng)VxWorks�ɞ�һ��ͨ�õ�Ƕ��ʽܛ���_�l(f��)����ʹ�����P(gu��n)�ĸߌӵ�Ƕ��ʽ��(y��ng)���܉���Ч���\�����ض��ġ���(y��ng)�����P(gu��n)��Ӳ���O(sh��)��֮�ϣ�ʹǶ��ʽ���r����ϵ�y(t��ng)VxWorks�Ŀ���ֲ�Դ��ӏ�(qi��ng)��
BSP�cVxWorks����ϵ�y(t��ng)�ČӴνY(ji��)��(g��u)���D1��ʾ��
�D1BSP�cVxWorks����ϵ�y(t��ng)�ČӴνY(ji��)��(g��u)�D
����PC104�����O(sh��)���VxWorks����ϵ�y(t��ng)ӳ���_�l(f��)��Ҫ������3�����棺
�ٰ��d֧�ְ��O(sh��)Ӌ�c�_�l(f��)
VxWorks���r����ϵ�y(t��ng)�İ��d֧�ְ����_�l(f��)ͨ���ṩһ��ģ������x��һ����ͬ̎�����Y(ji��)��(g��u)���d֧�ְ��M(j��n)���O(sh��)Ӌ��
�����P(gu��n)���Ӳ���O(sh��)���(q��)�ӳ���
Ƕ��ʽϵ�y(t��ng)��ᘌ�ijһ���w��(y��ng)�È����_�l(f��)�Č���ϵ�y(t��ng)����˳�����ʹ�õ�һЩ�ǘ�(bi��o)��(zh��n)��Ӳ���O(sh��)�䣬��VxWorks����ϵ�y(t��ng)�����ṩ���P(gu��n)�����O(sh��)�(q��)�ӳ���ʹ�Õr�������_�l(f��)����(y��ng)�����O(sh��)�(q��)�ӳ���
�۲���ϵ�y(t��ng)ӳ�������c����
��VxWorks����ϵ�y(t��ng)��������ģ�K�M(j��n)�����ã�ʹ���ڝM�㹦������ėl�����_(d��)�����a����С��ͬ�rҲ�p�ٳ��e�Ŀ����ԡ�
2.2 BSP�Ļ������ܼ��䆢���^�̷���
VxWorks�弉֧�ְ�BSP�ڹ����ϰ����ɂ����֣���ʼ�����(q��)�ӳ���֧�֡�BSP�ṩ��VxWorksͬӲ���h(hu��n)���Ļ����ӿڽ��棬������늕r�M(j��n)��Ӳ����ʼ��(�����Д������ij�ʼ�������r����ʼ�������ă�(n��i)��ӳ��ļ��d��)��֧��VxWorks��Ӳ���(q��)�ӵ��L������VxWorks��ܛ�����ɵ�һ�w���书���ஔ(d��ng)��PC�C(j��)��BIOS��
VxWorks��(n��i)�˵ļ��d�֞�ɂ����E����һ�����E��PCBIOS��bootrom�ļ��d���ڶ������E��BSP����(d��o)ӳ��bootrom��VxWorks����ϵ�y(t��ng)ӳ����d����������������ʾ��
2.3 BSP�к���(sh��)�{(di��o)���^�̷���
BSP���Ӳ���ϵ�y(t��ng)���^���У���Ҫ�{(di��o)��һ�к���(sh��)����Ɍ�ϵ�y(t��ng)��(n��i)��ӳ��ļ��d�������^�̷������£�RomInit����(sh��)��ʼ��̎�������P(gu��n)�]���پ��棬�P(gu��n)�Д࣬��ʼ����(n��i)�档�����{(di��o)��RomStart����ӳ��Ĕ�(sh��)��(j��)�ο�ؐ��RAM��ȥ��Ȼ���{(di��o)��usrInit()��Bss�����㣬�{(di��o)��intVecBaseSet()�O(sh��)��ʸ������ַ�����{(di��o)��excVecInt()��ʼ���Д��Լ�����������������ʼ��ϵ�y(t��ng)Ӳ�����{(di��o)��usrKernelInit()��ʼ��wind��(n��i)�ˣ�����(zh��)�����̈�(zh��)�е�kernelInit()��kernelInit����wind��(n��i)�ˡ�Wind��(n��i)�˵ĵ�һ���΄�(w��)��usrRoot��ͨ�^�{(di��o)��usrAppInit�����Ñ����΄�(w��)��ϵ�y(t��ng)���������ӡ�
2.4 ��BSP�O(sh��)Ӌ��Ҫ
һ����r�£�Tornado�ṩһЩ�u����İ��d֧�ְ�����PC104���C(j��)���Ǹ���(j��)�������H��Ҫُ�I�ģ��u����İ��d֧�ְ����܉�ֱ��ʹ�ã���Ҫ�M(j��n)�������ơ����еķ����ǣ�����pc586��BSP����ģ���M(j��n)���m��(d��ng)�ģ��ԝM���@��PC104���C(j��)����ض�Ӳ���h(hu��n)����
���d֧�ְ�ͨ�������Tornado�İ��bĿ����棬��·����Root/target/config/bspname��root����tornado�İ��bĿ䛡��O(sh��)Ӌһ�����õ��µİ��d֧�ְ�����회�Tornado�����Ԏ����d֧�ְ���һ���ķ�����pc586���d֧�ְ���Ҫ����һЩC�ļ���һЩ�R���ļ��������ǣ�config.h��configAll.h��Pc.h��sysLib.c��ctdt.c��sysNetif.c��mkboot.c�����d֧�ְ���ȱʡ��������configALL.h���_���ģ��Ñ���ͨ�^config.h����׃?n��i)�ʡ���á�ȱʡ�����ǰ���̎�����S�̵��u�������Ӳ���M(j��n)��ϵ�y(t��ng)���ã�����(j��)���HӲ���h(hu��n)����һ����Ҫ��һ���ĸĄӣ�ͨ������config.h���M(j��n)�У�ͨ�^һϵ�еĶ��x�꣬���ϵ�y(t��ng)���ƹ�����
Ҫ�O(sh��)Ӌᘌ��@������������ԇ�����x�õ�PC104���C(j��)����d֧�ְ�������VxWorks��CF��֧�֣���Ҫ�����^��Ąӵ��ļ���config.h��configAll.h�Լ�sysLib.c�@3���ļ������w���£�
����config/bspname/bspname.h���ҵ�����CF�����Д�̖�����һ���Д�̖0x9���A(y��)���oӲ�P�ӿڣ����˱���a(ch��n)���Д��_ͻ����#define ATA1_INT_LVL0x9���Ğ�#define ATA1_INT_LVL0xf
����config/bspname/sysLib.c���ҵ�ATA_RESOURCEataResource[]={................PCMCIA................ }
��ATA_RESOURCEataResource[]={................IDE_LOCAL................. }
����߀��Ҫ�Č������ą���(sh��)������ATA1_CONFIG�ȡ�
����config.h�У���#define SYS_WARM_ATA_CTRL 0�Ğ�#define SYS_WARM_ATA_CTRL 1�@��ϵ�y(t��ng)�ᆢ�Ӻ͕���CF���ϵ�����(d��o)�^(q��)������(d��o)��
����config.h�Ќ�#define SYS_WARM_TYPE SYS_WARM_FD/*warmstartdevice*/�Ğ�#define SYS_WARM_TYPESYS_WARM_ATA
����ataType��(sh��)�Mʹ�������x��CF���Ď΅���(sh��)(�ŵ����ȅ^(q��)�������)��ȡ�
��ԭ����ataTypes��(sh��)�MATA_TYPEataTypes[ATA_MAX_CTRLS] [ATA_MAX_DRIVES]= {................{{761��8��39��512��0xff}��/*ctrl1drive0*/...............}��
��ATA_TYPE ataTypes [ATA_MAX_CTRLS] [ATA_MAX_DRIVES]= {................{{984��16��4��512��0xff}��/*ctrl1drive0*/...............}��
�@������(sh��)���������C(j��)���BIOS�в��ҵ����M(j��n)��BIOS��ʹ��idedetection�Ϳ��Բ鿴��CF���΅���(sh��)������(j��)�鵽CF���Ď΅���(sh��)���Ϳ�����sysLib.c����������(y��ng)���ġ�
2.5 BSP���{(di��o)ԇ
ᘌ����d֧�ְ����O(sh��)Ӌ�_�l(f��)��VxWorks���]���ṩ�˷dz��õ��{(di��o)ԇ�ֶΣ��@�Ӿͽo�{(di��o)ԇBSP�����ĺܴ����y�������ڌ�BSP�M(j��n)���{(di��o)ԇ֮ǰ���M���p�ٴ��a����ͨ�^�Č�B(t��i)SPĿ���Makefile��ȥ������Ҫ�Ĵ��a���g��Ȼ���ٌ�BSP�{(di��o)ԇ���{(di��o)ԇ�ķ�ʽһ������W���ķ�ʽ��ͨ�^�����Ɇ��Ĵ��a֮�g�����W���Ĵ��a��ͨ�^��I/O�˿ڵĿ�ҕLED�L�����^����Ƿ��W�����Д�BSP�Ĉ�(zh��)�����̡�
3 �Y(ji��)���Z
ͨ�^���ԇ���{(di��o)ԇ����K�O(sh��)Ӌ���˻���PC104������VxWorks���d֧�ְ�������(y��ng)����ij���w�C(j��)ȼ��ϵ�y(t��ng)�����ܻ����������`�Y(ji��)���������@�N������һ�N�Ќ����еķ�����
��ԓ�O(sh��)��ĸ�Ҫ�_ʼ.ָ��ԓ�(q��)�ӌ��F(xi��n)�����O(sh��)��IJ���߀��ȫ����(x��)��(ji��).
��������ԓ�O(sh��)��IJ���ģʽ,ָ��ԓ�(q��)�������F(xi��n)�����ķN.
����ԓ�O(sh��)����BSP�Є�(chu��ng)���ͳ�ʼ���IJ��E.�����ɰ�ԓ�(q��)�Ӷ��ƞ�����Ӳ���h(hu��n)�������к�(macros).
�������пɎ����Ñ�����ԓ�O(sh��)����ι������O(sh��)��Ľӿ�.
ģ���Ҫ:
�@��һ�������(q��)��ģ��.���Á����錑Vxworks5.3����°汾�����(q��)�ӵ����c.
�@Щ�(q��)��֧���f�����(q��)�ӛ]�е��¹���,����,�����ṩһ���O(sh��)��Ӳ���x헵Ľӿ�;
����,ֹͣλ��(sh��),��(sh��)��(j��)λ,��ż,�ȵ�.
���,�����ṩ���Á��ṩ���ھ��ϵ��ⲿģʽ�{(di��o)ԇ(��,ROM�O(ji��n)ҕ���{(di��o)ԇ)��݆ѲͨӍ(polled communication)�ӿ�.ͨ��ֻ֧�֮���ģʽ�(q��)��. ؞�������ļ�,���~"template"�Á���Qһ���挍���O(sh��)����,���T�����ÏS�����ĵ�һ����ĸ�Ӯa(ch��n)Ʒ��̖.����,Zilog 8530 �����O(sh��)�䑪(y��ng)һ������Z8530����DUSAART
��(sh��)��(j��)�Y(ji��)��(g��u)�����^TEMPLATE_DUSART.
��(sh��)��(j��)�Y(ji��)��(g��u)
�O(sh��)�䔵(sh��)��(j��)�Y(ji��)��(g��u)���ļ� h/drv/sio/templateSio.h�ﶨ�x��һ����(sh��)��(j��)�Y(ji��)��(g��u)����TEMPLATE_CHAN�����x����ÿ��ͨ�������жമ��ͨ�����O(sh��)��Ҳ������оƬ���x��һ����(sh��)��(j��)�Y(ji��)��(g��u).���磬���(q��)����һ��оƬ���ģ��Ѓɂ�ͨ���Y(ji��)��(g��u)����ɆT��(sh��)��(j��)�Y(ji��)��(g��u)��TEMPLATE_DUSART��
���{(di��o)
��ݔ��(zh��n)��;w(transmitter ready)�Д��{(di��o)�÷���(w��)���û��{(di��o)���ߌӎ��ԫ@��һ���ַ�����͡� Ĭ�J(r��n)�أ����(q��)�Ӱ��b�����κ�����Ŀ��ܻ��{(di��o)����ʹ�ô��(q��)�ӵĸߌӎ�(����,ttyDrv)����SIO_INSTALL_CALLBACK��������(ioctl command)���b�Լ��Ļ��{(di��o)����. ͬ�ӣ�һ�������Д�̎�����û��{(di��o)�팢�ַ����o�ߌӎ졣
ģʽ
����ģʽ��ԓ�(q��)�ӑ�(y��ng)֧��݆Ѳ���Д�ģʽ�����ɄӑB(t��i)�ГQģʽ�����@���DZ�횡�Vxworks��֧�ִ��O(sh��)���ϵ�tty�O(sh��)��,��ʹԓ�(q��)��ֻ֧��
�Д�ģʽ.
���ӄӑB(t��i)ģʽ�ГQ���S��(d��ng)��Ϣ����?x��)r���ⲿ��������(���磬�ڵ�һ�E�r�Д�). �����S�ӑB(t��i)ģʽ�ГQ���(q��)�ӣ�ע���(q��)�ӌ�����ݔ��ISR���g��Ҫ���ГQģʽ.һ���(q��)�ӵ�ݔ��ISR�����푪(y��ng)���: inChar = *pDev->dr;/@ �Ĕ�(sh��)��(j��)�Ĵ������xһ���ַ� @/ *pDev->cr = GOT_IT;/@ ���J(r��n)�Д�@/ pDev->putRcvChar (...);/@ �l(f��)���ַ����ߌ� @/ /@ give the character to the higher layer @/ ���ԓͨ�������ⲿģʽ�{(di��o)ԇ��ͨӍ·��,�ҽ��յ�ԓ�ַ���"���Y(ji��)��"�ַ����t�����Ļ��{(di��o)���i���Д࣬�ГQ�O(sh��)�䵽݆Ѳģʽ,��ʹ��݆Ѳģʽ�µ��O(sh��)��Ƭ��.�˺��������i�Д࣬�ГQģʽ���Д�ģʽ��������ISR. �e�أ����{(di��o)��ʹ��ģʽ�ГQ�����ȵ�݆ѲģʽȻ���Д�ģʽ����. �@Ҫ��С��̎���Д�̎���(n��i)�Ļ��{(di��o)�����磬���{(di��o)�û��{(di��o)ǰ�����ȳ��J(r��n)�Дࡣ
�÷�:
ԓ�(q��)��ͨ����BSP�{(di��o)��.ԓģ�K��ֱ���{(di��o)�ó����� templateDevInit(), templateDevInit2(),templateIntRcv(), templateIntTx(), and templateIntErr(). BSP�{(di��o)��templateDevInit()����ʼ�����؆�оƬ.����intConnect()�B���Д�̎��(templateIntRcv, templateIntTx,�� templateIntErr). �B���Д�̎����BSP�{(di��o)��templateDevInit2()�����V�(q��)���Д�ģʽ�����ѿ���.
BSP: ����Ҏ(gu��)����BSP�ض��Ĵ��ڳ�ʼ����sysSerial.c(��sysLib.c����)���M(j��n)��, sysSerial.c���F(xi��n)����4������(sh��):sysSerialHwInit(),sysSerialHwInit2(), sysSerialChanGet(),��sysSerialReset(),���¹���: sysSerialHwInit��sysHwInit�{(di��o)�Á���ʼ�������O(sh��)��.�˳���?q��)����{(di��o)����(f��)λ�O(sh��)�估���b�(q��)�Ӻ���(sh��)ָᘵ�templateDevinitǰ��ʼ��TEMPLATE_DUSART�Y(ji��)��(g��u)�����а��ض��ą^(q��)��(��,�Ĵ�����I/O��ַ���ȵ�).sysSerialHwInit߀����(zh��)�������д����(q��)������Ҫ���^�̣������m��(d��ng)���ð��ϵ��Д������. sysSerialHwInit2��sysHwInit2�{(di��o)�Á���intConnect�B���(q��)�ӵ��Д�̎��.�B�Ӻ��Д�̎����templateDevInit2���{(di��o)�����S�Д�ģʽ�����_ʼ. sysSerialChanGet��usrRoot�{(di��o)�Á�ȡ���c����ͨ��̖���P(gu��n)�Ĵ���ͨ����.ԓ����ʹ��һ��0-NUM_TTY֮�g��һ����(sh��)���һ�ą���(sh��).������һ��ָ������(y��ng)ͨ����������SIO_CHAN * ��ָ�,��������TEMPLATE_CHAN�Y(ji��)��(g��u)�ĵ�ַ. sysSerialReset��sysToMonitor()�{(di��o)���ҕ���(f��)λ�����O(sh��)�䵽һ������ӵĠ�B(t��i). ԓ�(q��)�ӿ�ͨ�^�ض��xTEMPLATE_REG_READ��TEMPLATE_REG_WRITE�������.�@�ɂ����Á��L�����H��оƬ.�粻���x��Դ���a���ٶ��Ì����мĴ��read/write�L���팦�O(sh��)���M(j��n)�к���(n��i)��ӳ��.
�yԇ:
�Д��(q��)�ӽӿڿ���ͨ��������yԇ.��(d��ng)��(�yԇ��Ϣ,�g�����Dzy)�����rVxworks��ӡ�����ڿ����_,���ǿ�����늺�VxWorksݔ����ʾԓ�(q��)�ӻ����_ʼ����. VxWorks��Portkit�yԇҲ���Á��M(j��n)�и���(y��n)��Ĝyԇ. ݆Ѳ�ӿ����ױ��z������{(di��o)��ͨ����SIO_MODE_SET ioctllaiʹ���M(j��n)��݆Ѳģʽ.ע��ͨ���Ĵ�ӡ���߲�����݆Ѳģʽ���c����ͨ��һ����.һЩ������횈�(zh��)��݆Ѳѭ�h(hu��n)��̎�������ַ����ַ�ݔ��/ݔ��.�@�����Ԅ��M(j��n)��.��(d��ng)�ГQWDB���ھ���݆Ѳģʽ�r��WDB�����(zh��)�����Լ���݆Ѳѭ�h(hu��n). �ӑB(t��i)ģʽ�ГQ����tornado���߁�z��.�������ô���ʹ��WDB_COMM_UDLP_SLIPͨӍ·��(ԔҊVxWorks run_time Guide�������¹�(ji��)). �����_ʼwtxtcl %wtxtcl ��tcl��ʾ��,�B�ӵ�target server: wtxtcl.ex> wtxToolAttach ֪ͨ������D(zhu��n)�Q�ⲿģʽ�z��ؑ�(y��ng)��OK(0). wtxtcl.ex>wtxAgentModeSet 2 0 Ҫ��������ϵ�y(t��ng)(Ո������Д�ģʽ���������ؑ�(y��ng)����݆Ѳģʽ������): wtxtcl.ex>wtxContextSuspend 0 0 0 �ڴ˕rĿ��(bi��o)��������.�����_���@ʾ���Y(ji��)(���忨��һ�������_�O(sh��)��),�㲻��"ping"Ŀ��(bi��o)�ľW(w��ng)�j(lu��)�ӿ�.
�֏�(f��)Ŀ��(bi��o):
wtxtcl.ex>wtxContextResume 0 0 0 �F(xi��n)��Ŀ��(bi��o)�������\�У�������������Ϣ�������_(����忨��һ�������_�O(sh��)��)���ɏ����C(j��)"ping"Ŀ��(bi��o)�ľW(w��ng)�j(lu��)�ӿ�.
vxworks��bsp�����̳�
1 vxworks����
vxworks��WIND RIVER��˾�Įa(ch��n)Ʒ������һ�N���õ�Ƕ��ʽ����ϵ�y(t��ng)?vxworks���Џ�(qi��ng)��Ĺ��ܺ��Ѻõ��Ñ����档�c���M��Ƕ��ʽ����ϵ�y(t��ng)���?���ò���ϵ�y(t��ng)��(j��ng)�^��(y��n)��Ĝyԇ?�������õČ��r��?�����Ժʹ������ęn֧��?��������Դ�a�Dz����_�IJ��҃r���F;���M��Ƕ��ʽ����ϵ�y(t��ng)�кܶ�?����linux����ֲ?���_Դ���a?��ȱ���ęn?Ҫ����Դ�a�M(j��n)���_�l(f��)��
2 BSP������
BSP���̷ֳɃɲ��֡�������λ��BootRom�е�Boot���a?���������nj��F(xi��n)����Ӳ���͆���vxworks���d�����������d�����D(zhu��n)��vxworks����ڵ�ַ�\�в���ϵ�y(t��ng)�͑�(y��ng)�ó���
������D:
ROM�еĆ��Ӵ��a����:RomInit���ļ����ļ�romInit.s�С������\�е��_ʼ?���F(xi��n)�@һ���������ȵġ������F(xi��n)�Д��������?���Ã�(n��i)�˺ͷǃ�(n��i)�˼Ĵ����Լ���(n��i)�������O(sh��)����x���r��?��˿����ڴ�̎�����(n��i)��z�y���ܡ���BSP�Пo���M(j��n)���{(di��o)ԇ?ֻ��ͨ�^�W�F(xi��n)�������_�c����Дࡣ�W�����ܺ���(sh��)ҲҪ�ڴ˼��롣�Д�������ͺ����üĴ���?�@һ���ֲ���Ҫ�Ąӡ����Ã�(n��i)�������O(sh��)���x���r��?Ҫ�M(j��n)�иĄӡ��@һ���ֵ�SDRAM?ROM?FLASH?FPGA������(y��ng)��ģ����ԅ��������Č��F(xi��n)��ͨ�^ʹ�ú궨�x�팍�F(xi��n)�ġ�����Ҫ�Ąӵ�ԒҲ���y?һ���ǸĄӿ��g��С������λ?�x��λ��(sh��)?�Լ�Ƭ�x�Ĵ���OR��BR�������������O(sh��)���x���д�ӑՓ����(n��i)��z�y���@��F(xi��n)�^��(f��)�s?������(j��)����(y��ng)�ă�(n��i)��z�y�㷨���F(xi��n)����Ҫ�nj���ַ���͔�(sh��)��(j��)���ęz�y��ͨ�^���딵(sh��)��(j��)�ٕ��x����(sh��)��(j��)���Дࡣʹ��"�߲�1"��"�߲�0"
�㷨���@һ�����^�����هӲ��?����ֲ���^��?����(j��)�Լ��Ćΰ�Ąӡ��W�����@һ�����Ǐ�(qi��ng)�����]�ġ�����W�����ܶ�λ������\��λ�á��W������(sh��)����ֲ?һ��Ҫ�Ą�?�������ܽ��ڲ�ͬ��I/O���ϡ�����ע��860SAR��PORT B��32λ�ġ����w�Ķ˿�Ҋ����(y��ng)��CPU��I/O�ڵą���(sh��)?��������(y��ng)�ļĴ�����
RomInit�ں���(sh��)�Y(ji��)β����RomStart��
RomStart��BootInt.c�ļ��С�����ϵ�y(t��ng)�\�еĵ�һ��C����(sh��)���@һ������Wind River��˾�ṩ�Ę�(bi��o)��(zh��n)����?һ�㲻��Ąӡ�ԓ����(sh��)��C����ں���(sh��)���ɅR�������{(di��o)�ã���Ҫ������(n��i)�棬��ROM�еij���ؐ��RAM���≺�������≺��ij���̎�\�С�UsrInit��BootConfig.c�ļ��С�����Ҫ�nj��F(xi��n)Ӳ���ij�ʼ���������漰������?�W(w��ng)�ڵij�ʼ��?CONSOLE�����õȡ����д��ں;W(w��ng)�ڵ�����BSP����Ҫ����?��860CPU�����ں������кܺõ�֧��?ֻҪ����С�ĸĄӼ���?���ںܺ���?�W(w��ng)���^��(f��)�sһЩ��UsrRoot��BootConfig.c�ļ��С�����Ҫ�nj��F(xi��n)vxworks�ļ������d?�������D(zhu��n)��vxworks����ڵ�ַ���Ķ��M(j��n)�뵽����ϵ�y(t��ng)��ȥ��
VXWORKS�ļ��еĴ��a����:
SysInit��sysAlib.s�С�����vxworks�Ć��Ӵ��a�����cRomInit��������ͬ?�����@���ļ�?�҂�һ�㲻��Ҫȥ�Ą�����UsrInit��Usrconfig.c�С����������cBoot�е�UsrInit��������ͬ?�������{(di��o)��SysLib.c�е��Ӻ���(sh��)�����F(xi��n)��ͬ��Ӳ����ʼ�����ܡ�UsrRoot��UsrConfig.c�С����������cBoot�е�UsrRoot��������ơ������@���UsrRoot����K�M(j��n)�뵽��(y��ng)�ó�����ȥ��
��(d��ng)ǰ�ձ�ʹ�õ�DSP�Z��̎�����g(sh��)ֻ�܌��Z���M(j��n)�к���̎���������m��(y��ng)�Z���I(y��)��(w��)�Ķ��ӻ�څ�ݡ����Ľ�B����MPC860��VxWorks���F(xi��n)�C���Z��ͨ��ƽ�_��֧�ֶ�忨����·�Z�r��ݔ���ɔU(ku��)չ��·�Z���� ���ܡ�����MPC860��ͨ�ź���̖̎�����ܣ���Vx-Works����ռ�ÿ��gС����(zh��)��Ч�ʸߡ������M(j��n)�Ђ��Ի����ƺ��^�õļ����Ե����c������ԓ�C���Z��ͨ��ƽ�_�ڹ��ܡ�Ӳ���Y(ji��)��(g��u)���w�e�������Լ��`�����Ͼ����^��(y��u)�ݡ�
���O(sh��)Ӌ�бM������Ƕ��ʽ�_�l(f��)�еij����������Ա��ԼӸĄӼ��ɑ�(y��ng)���������O(sh��)Ӌ�����Ը���(j��)���H��Ҫ����ϵ�y(t��ng)���Z��ͨ���Ĕ�(sh��)Ŀ�͔U(ku��)չ��·�Z���� ���ܵȡ�
1 ϵ�y(t��ng)�Y(ji��)��(g��u)������ԭ��
1��1 ϵ�y(t��ng)�M�ɼ����c
����ͨ��ƽ�_���Z��ͨ��̎��������Z���ɼ��ط��Ӱ�M�ɡ��Z��ͨ��̎���������CPU MPC860��FLASH�惦����SDRAM�惦����10��100Mb��s�W(w��ng)�j(lu��)�ӿڡ�RS 232���ڡ�BDM�{(di��o)ԇ�ӿڡ�Console�ӿڡ���늺͏�(f��)λ�·��120pin�B������ͨ��̎������ĺ���MPC860��Motorola��˾��һ����MC68360��׃������ͨ�Æ�Ƭ����Ƕ��ʽ̎�������m����ͨ�ź;W(w��ng)�j(lu��)ϵ�y(t��ng)��ԓ̎������(n��i)���Ѓɂ�̎������PowerPC��32λRISC̎������PowerPC��ͬ��(n��i)������Ԫ(MMU)��ָ��͔�(sh��)��(j��)Cacheһͬ̎���ߌӴΑ�(y��ng)�ã�CPM�tؓ(f��)؟(z��)��ɵ͌Ӕ�(sh��)��(j��)ͨ�š��ɂ�̎������Ҫͨ�^�����(n��i)�潻����ͨ��̎��ģ�K����SCC��SMC��SPI��I2C����ͨ���c�ⲿ�O(sh��)��ͨ�ţ�����SCC��SMC֧�֕r�֏�(f��)�á��O(sh��)Ӌ�У�SCC������QMC�f(xi��)�hTrans-parent Mode��ͨ��̎��ģ�K(CPM)�����˔�(sh��)����̖̎��(DSP)���ܡ��Z���ɼ��ط��Ӱ����Z���ɼ��·���Z���ط��·������FPGA���F(xi��n)��ͨ�ſ��������c�Z��ͨ��̎�������B�ӵ�120pin�B�����M�ɡ�
����MPC860�Ĕ�(sh��)��(j��)��ݔ�ٶ����ADC��DACҪ��ܶ࣬�O(sh��)Ӌ����(y��ng)��߉�·�����Z���IJɼ��ͻطš��f(xi��)�{(di��o)MPC860�͔�(sh��)��(j��)�ɼ����ط��·֮�g��ͨ���DZ��Cϵ�y(t��ng)�����������P(gu��n)�I�������O(sh��)Ӌ�˻���Altera��˾��Cyclone��EP2C8оƬ���F(xi��n)��ͨ�ſ���������Q�@һ���}��
��ͨ��ƽ�_�֞��Z��ͨ��̎��������Z���ɼ��ط��Ӱ�քe�O(sh��)Ӌ���F(xi��n)���Ǟ��˽���ϵ�y(t��ng)�_�l(f��)�y�Ⱥͱ���ϵ�y(t��ng)�S�o(h��)�������͔U(ku��)չ�������Z��ͨ��̎������o��ĄӼ����������е��B������FEC�W(w��ng)�j(lu��)�ӿں�SDRAM�惦�����YԴ�cҕ�l����aоƬ��ҕ�l���s���≺�sоƬ�M�ɾW(w��ng)�j(lu��)ҕ�l����(w��)����
1��2 ���ܽY(ji��)��(g��u)����ԭ��
�Z��ͨ��̎������Ĺ��ܽY(ji��)��(g��u)��D1��ʾ��

ϵ�y(t��ng)��늺��Z��ͨ��̎�������(f��)λ�·�a(ch��n)����(f��)λ��̖��MPC860���յ���(f��)λ��̖�����D(zhu��n)��0X100̎�_ʼ��(zh��)�І��Ӵ��a������BSP������(zh��)��CPU��ʼ������������Ӳ���·�ij�ʼ��������ϵ�y(t��ng)�\�����蔵(sh��)��(j��)�Y(ji��)��(g��u)�ij�ʼ��������VxWorks WIND��(n��i)�ˡ���(chu��ng)��UserRoot�΄�(w��)����ʼ��ϵ�y(t��ng)���õ��Ŀ��x�U(ku��)չģ�K(��I��Oϵ�y(t��ng)���ļ�ϵ�y(t��ng)���W(w��ng)�j(lu��)�f(xi��)�h��)����(chu��ng)���΄�(w��)usrAppInit()���˕r�Z��ͨ��ƽ�_��(zh��n)��;w�����Ԉ�(zh��)���Z��ͨ���΄�(w��)���ɼ���Ĺ��ܽY(ji��)��(g��u)��D2��ʾ���Z��ͨ��̎�����冢���ꮅ���Z���ɼ��ط��Ӱ����ͨ�ſ����������²ɼ��ͻط��Z���������Z����(sh��)��(j��)�M(j��n)�Љ��s����a��IP���b������b̎����
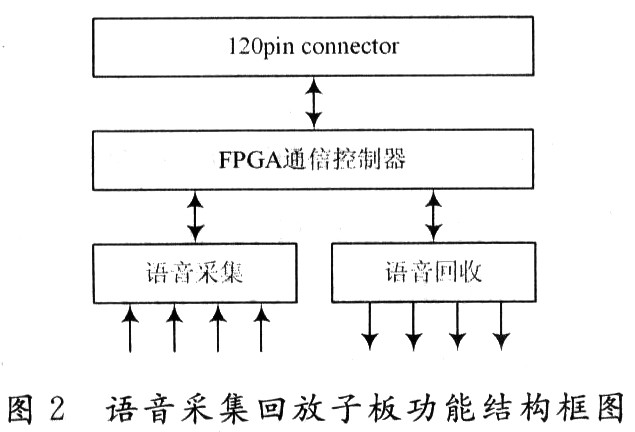
1��3 ��(sh��)��(j��)̎������
MPC860T��ADC AD7825��DAC AD7305֮�g��ͨ����ͨ�ſ��������ơ�ͨ�ſ������ɔ�(sh��)��(j��)���_�^(q��)(Rx FIFO��Tx FIFO)������FSM(���ޠ�B(t��i)�C(j��))���F(xi��n)�Ŀ���߉(Rx control��Tx control)��8λ�����������D(zhu��n)�Q�����r��·�M�ɡ��䔵(sh��)��(j��)�����^�̞飺���տ���߉(Rx control)����ADC AD7825������ͨ�����Z����(sh��)�ֻ��������D(zhu��n)�Q�Y(ji��)��������վ��_�^(q��)(Rx FIFO)��ֱ��Rx FIFO�M�rRx control�_ʼ��MPC860T�ṩ�����Ԏ�ͬ����̖���l�ʞ�32 kHz��MPC860�ڎ�ͬ����̖�͕r���̖���(q��)�����xȡRx FIFO�еĔ�(sh��)��(j��)��SCC��(sh��)��(j��)���վ��_�^(q��)��Rx FIFO�x��(���xָ����ˌ�ָ�)��Rx controlֹͣ��MPC860�l(f��)�͎�ͬ����̖�Kֹ��(sh��)��(j��)��ݔ��ͬ�r��MPC860�l(f��)���Д���̖IRQ3��MPC860푑�(y��ng)�Д�є�(sh��)��(j��)�Ľ��վ��_�^(q��)�x������ring buffer�еȴ���(y��ng)�ó���̎�����䔵(sh��)��(j��)�l(f��)���^�̞飺MPC860���IP����b���≺�s����Z����(sh��)��(j��)�����ڙz�y���l(f��)�;��_�^(q��)���Õr��ݔ����SCC�l(f��)�;��_�^(q��)��ͨ�ſ������ṩ�l(f��)�͎�ͬ����̖�(q��)�Ӕ�(sh��)��(j��)��ݔ?sh��)�Tx FIFO(�l(f��)�;��_�^(q��))������Tx FIFO�M�rֹͣ�l(f��)�͎�ͬ����̖����(sh��)��(j��)�l(f��)�����CPM�����㣬TxBD)�е�Rλ��ʾMPC860����SCC�l(f��)�;��_�^(q��)���b���µĔ�(sh��)��(j��)�����´�ݔ����(zh��n)�䡣
1��4 QMCͨ�Ņf(xi��)�h
��ͨ��������(QUICC Multichannel Controler��QMC)�Ǟ��ˌ��F(xi��n)�r�֏�(f��)�Ô�(sh��)��(j��)��ݔ���O(sh��)Ӌ�ģ������ѕr�֏�(f��)�Î��Ĕ�(sh��)��(j��)�ְl(f��)�����_(d��)64��߉ͨ����ԓģʽ�°�ÿһ���Ĕ�(sh��)��(j��)���ֳ����ɂ��r϶(Timeslots)��ÿ�r϶8 b���ڕr϶�������Ҏ(gu��)��ÿ�r϶��(sh��)��(j��)�Č���ij��ͨ����ÿ��ͨ������һ�M�ض��ľ��_�^(q��)������������(y��ng)�ľ��_�^(q��)��һ���r϶�Ĕ�(sh��)��(j��)���հl(f��)�r���������ض��ľ��_�^(q��)�MPC860T�Ϳɰѷ�ɢ�Ĕ�(sh��)��(j��)�ۼ���һ��l(f��)�ͣ���Ѿۼ���һ��Ĕ�(sh��)��(j��)�ְl(f��)�����Ԍ��õľ��_�^(q��)��������Ҫ�~���̎���^(q��)�ָ��N���ӵĔ�(sh��)��(j��)����
2 BSP �O(sh��)Ӌ���F(xi��n)
�O(sh��)Ӌ��ܛ���_�l(f��)��Ҫ�������Ӵ��a�ľ���������ϵ�y(t��ng)����ֲ��Ӳ���(q��)�ӳ�����Z��������a��IP���b������b��(y��ng)�ó���ƪ�����ޣ����ăH��BBSP��ֲ��BSP���弉֧�ְ����书�ܞ�Ӳ����ܛ����ʼ��������Ӱ������d���O(sh��)���(q��)�ӵȡ�
2��1 BSP�Ķ���
�oՓ��BootRom߀��VxWorks��Ҫʹ��BSP���a��BSP������Ҫ����(j��)Ӳ�����á�ϵ�y(t��ng)�O(sh��)Ӌ����ܛ�����ܵȌ��H��r�����H�_�l(f��)�^���У����˿s�̮a(ch��n)Ʒ�_�l(f��)���ڣ�ͨ����WINDRIVER��˾��BSPģ����ߵ�������˾�ṩ�Ŀɹ�������BSP����A(ch��)������(j��)ܛӲ�����w�����M(j��n)���ģ������µij����(q��)������Ӳ�����ܡ����n�}���Ȱ�APC860�_�l(f��)���BSPMPC860TEVB��ؐ��installdir����Tornado��target��collfig��ppcs860Ŀ��£���Ҫ�������ġ�
2��1��1 config��h�ļ�
����(j��)���H��r����Ҫ�Ć����У���(n��i)���ַ�����������ã��IJ��ִ��a���£�
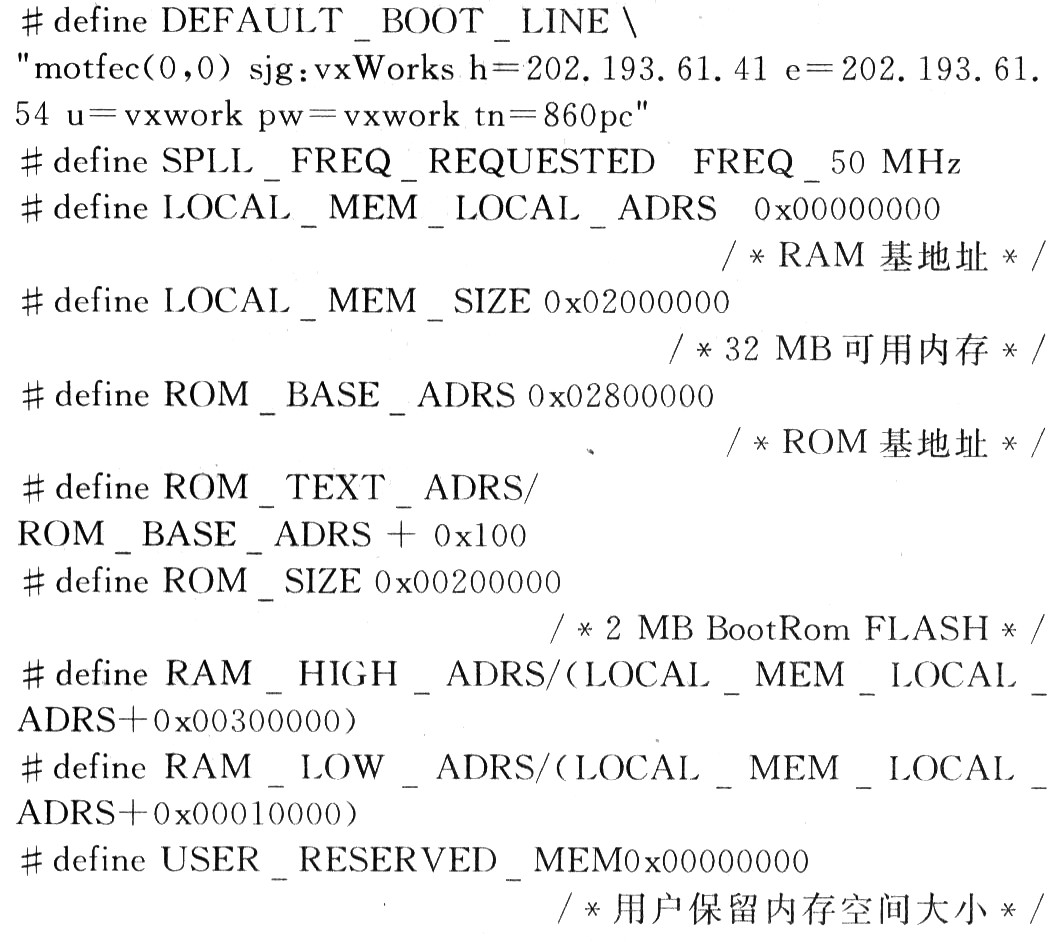
2��1��2 makefile�ļ�����
makefile�ļ����ģ����ֳ������£�
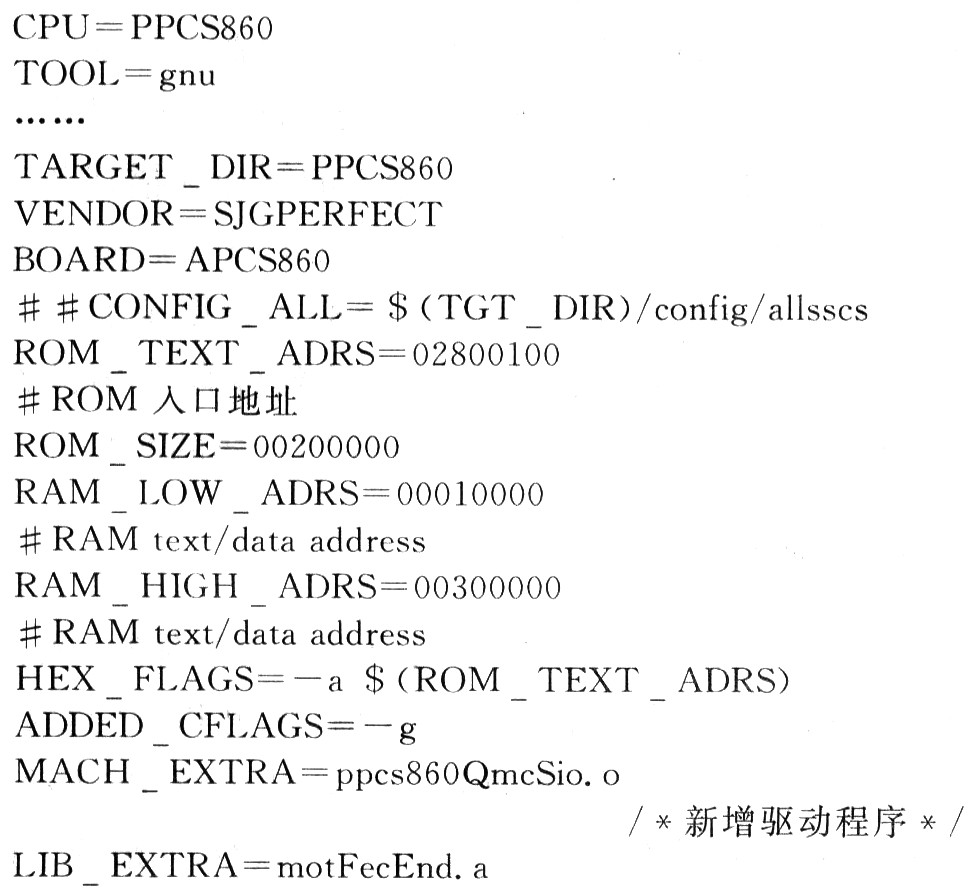
1.1 ��TFFS�ļ�ϵ�y(t��ng)���d


value = 1
> usrTffsConfig 0,0,��/tffs0��
value = 0
Ȼ��ͨ�^devs���鿴��ӵ��O(sh��)������
drv name
0 /null
1 /tyCo/0
1 /tyCo/1
5 host:
6 /pty/rlogin.S
7 /pty/rlogin.M
3 /tffs0/
8 /vio
value = 25 = 0x19
unit number : 0
processor number : 0
host name : host
file name : /tffs0/VxWorks
inet on ethernet (e) : 192.168.0.154
host inet (h) : 192.168.0.153
user (u) : target
ftp password (pw) : target
flags (f) : 0x0
other (o) : cpm
Attaching to TFFS... done.
Loading /tffs0/VxWorks...894304
Starting at 0x10000...
Development System
VxWorks version 5.5.1
KERNEL: WIND version 2.6
Copyright Wind River Systems, Inc., 1984-2003
CPU: Motorola ADS - PowerPC 860. Processor #0.
Memory Size: 0x1000000. BSP version 1.2/5.
WDB Comm Type: WDB_COMM_END
WDB: Ready.
/* Initialize Chip Select 0 for Bootrom */
/* ------------------------------------------------------------- */
lis r5, HIADJ( ROM_BASE_ADRS | BR_PS_8 | BR_WP | BR_V)
addi r5, r5, LO( ROM_BASE_ADRS | BR_PS_8 | BR_WP | BR_V)
stw r5, BR0(0)(r4)
lis r5, HIADJ( 0xFFF80000 | 0x00000100 | 0x00000080)
addi r5, r5, LO( 0xFFF80000 | 0x00000100 | 0x00000080)
stw r5, OR0(0)(r4)
/* -------------------------------------------------- */
/* Initialize Chip Select 1 for FLASH */
/* -------------------------------------------------- */
lis r5, HIADJ( 0x04000000 | BR_PS_16 | 0x00000001)
addi r5, r5, LO( 0x04000000 | BR_PS_16 | 0x00000001)
������(d��ng)ǰ�ձ�ʹ�õ�DSP�Z��̎�����g(sh��)ֻ�܌��Z���M(j��n)�к���̎���������m��(y��ng)�Z���I(y��)��(w��)�Ķ��ӻ�څ�ݡ����Ľ�B����MPC860��VxWorks���F(xi��n)�C���Z��ͨ��ƽ�_��֧�ֶ�忨����·�Z�r��ݔ���ɔU(ku��)չ��·�Z���� ���ܡ�����MPC860��ͨ�ź���̖̎�����ܣ���Vx-Works����ռ�ÿ��gС����(zh��)��Ч�ʸߡ������M(j��n)�Ђ��Ի����ƺ��^�õļ����Ե����c������ԓ�C���Z��ͨ��ƽ�_�ڹ��ܡ�Ӳ���Y(ji��)��(g��u)���w�e�������Լ��`�����Ͼ����^��(y��u)�ݡ�
�������O(sh��)Ӌ�бM������Ƕ��ʽ�_�l(f��)�еij����������Ա��ԼӸĄӼ��ɑ�(y��ng)���������O(sh��)Ӌ�����Ը���(j��)���H��Ҫ����ϵ�y(t��ng)���Z��ͨ���Ĕ�(sh��)Ŀ�͔U(ku��)չ��·�Z���� ���ܵȡ�
����1 ϵ�y(t��ng)�Y(ji��)��(g��u)������ԭ��
����1��1 ϵ�y(t��ng)�M�ɼ����c
��������ͨ��ƽ�_���Z��ͨ��̎��������Z���ɼ��ط��Ӱ�M�ɡ��Z��ͨ��̎���������CPU MPC860��FLASH�惦����SDRAM�惦����10��100Mb��s�W(w��ng)�j(lu��)�ӿڡ�RS 232���ڡ�BDM�{(di��o)ԇ�ӿڡ�Console�ӿڡ���늺͏�(f��)λ�·��120pin�B������ͨ��̎������ĺ���MPC860��Motorola��˾��һ����MC68360��׃������ͨ�Æ�Ƭ����Ƕ��ʽ̎�������m����ͨ�ź;W(w��ng)�j(lu��)ϵ�y(t��ng)��ԓ̎������(n��i)���Ѓɂ�̎������PowerPC��32λRISC̎������PowerPC��ͬ��(n��i)������Ԫ(MMU)��ָ��͔�(sh��)��(j��)Cacheһͬ̎���ߌӴΑ�(y��ng)�ã�CPM�tؓ(f��)؟(z��)��ɵ͌Ӕ�(sh��)��(j��)ͨ�š��ɂ�̎������Ҫͨ�^�����(n��i)�潻����ͨ��̎��ģ�K����SCC��SMC��SPI��I2C����ͨ���c�ⲿ�O(sh��)��ͨ�ţ�����SCC��SMC֧�֕r�֏�(f��)�á��O(sh��)Ӌ�У�SCC������QMC�f(xi��)�hTrans-parent Mode��ͨ��̎��ģ�K(CPM)�����˔�(sh��)����̖̎��(DSP)���ܡ��Z���ɼ��ط��Ӱ����Z���ɼ��·���Z���ط��·������FPGA���F(xi��n)��ͨ�ſ��������c�Z��ͨ��̎�������B�ӵ�120pin�B�����M�ɡ�
��������MPC860�Ĕ�(sh��)��(j��)��ݔ�ٶ����ADC��DACҪ��ܶ࣬�O(sh��)Ӌ����(y��ng)��߉�·�����Z���IJɼ��ͻطš��f(xi��)�{(di��o)MPC860�͔�(sh��)��(j��)�ɼ����ط��·֮�g��ͨ���DZ��Cϵ�y(t��ng)�����������P(gu��n)�I�������O(sh��)Ӌ�˻���Altera��˾��Cyclone��EP2C8оƬ���F(xi��n)��ͨ�ſ���������Q�@һ���}��
������ͨ��ƽ�_�֞��Z��ͨ��̎��������Z���ɼ��ط��Ӱ�քe�O(sh��)Ӌ���F(xi��n)���Ǟ��˽���ϵ�y(t��ng)�_�l(f��)�y�Ⱥͱ���ϵ�y(t��ng)�S�o(h��)�������͔U(ku��)չ�������Z��ͨ��̎������o��ĄӼ����������е��B������FEC�W(w��ng)�j(lu��)�ӿں�SDRAM�惦�����YԴ�cҕ�l����aоƬ��ҕ�l���s���≺�sоƬ�M�ɾW(w��ng)�j(lu��)ҕ�l����(w��)����
����1��2 ���ܽY(ji��)��(g��u)����ԭ��
�����Z��ͨ��̎������Ĺ��ܽY(ji��)��(g��u)��D1��ʾ��

����ϵ�y(t��ng)��늺��Z��ͨ��̎�������(f��)λ�·�a(ch��n)����(f��)λ��̖��MPC860���յ���(f��)λ��̖�����D(zhu��n)��0X100̎�_ʼ��(zh��)�І��Ӵ��a������BSP������(zh��)��CPU��ʼ������������Ӳ���·�ij�ʼ��������ϵ�y(t��ng)�\�����蔵(sh��)��(j��)�Y(ji��)��(g��u)�ij�ʼ��������VxWorks WIND��(n��i)�ˡ���(chu��ng)��UserRoot�΄�(w��)����ʼ��ϵ�y(t��ng)���õ��Ŀ��x�U(ku��)չģ�K(��I��Oϵ�y(t��ng)���ļ�ϵ�y(t��ng)���W(w��ng)�j(lu��)�f(xi��)�h��)����(chu��ng)���΄�(w��)usrAppInit()���˕r�Z��ͨ��ƽ�_��(zh��n)��;w�����Ԉ�(zh��)���Z��ͨ���΄�(w��)���ɼ���Ĺ��ܽY(ji��)��(g��u)��D2��ʾ���Z��ͨ��̎�����冢���ꮅ���Z���ɼ��ط��Ӱ����ͨ�ſ����������²ɼ��ͻط��Z���������Z����(sh��)��(j��)�M(j��n)�Љ��s����a��IP���b������b̎����
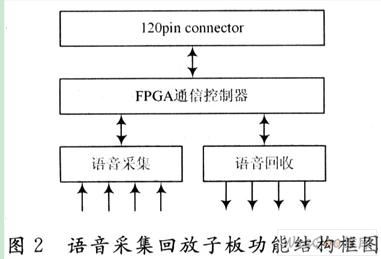
����1��3 ��(sh��)��(j��)̎������
����MPC860T��ADC AD7825��DAC AD7305֮�g��ͨ����ͨ�ſ��������ơ�ͨ�ſ������ɔ�(sh��)��(j��)���_�^(q��)(Rx FIFO��Tx FIFO)������FSM(���ޠ�B(t��i)�C(j��))���F(xi��n)�Ŀ���߉(Rx control��Tx control)��8λ�����������D(zhu��n)�Q�����r��·�M�ɡ��䔵(sh��)��(j��)�����^�̞飺���տ���߉(Rx control)����ADC AD7825������ͨ�����Z����(sh��)�ֻ��������D(zhu��n)�Q�Y(ji��)��������վ��_�^(q��)(Rx FIFO)��ֱ��Rx FIFO�M�rRx control�_ʼ��MPC860T�ṩ�����Ԏ�ͬ����̖���l�ʞ�32 kHz��MPC860�ڎ�ͬ����̖�͕r���̖���(q��)�����xȡRx FIFO�еĔ�(sh��)��(j��)��SCC��(sh��)��(j��)���վ��_�^(q��)��Rx FIFO�x��(���xָ����ˌ�ָ�)��Rx controlֹͣ��MPC860�l(f��)�͎�ͬ����̖�Kֹ��(sh��)��(j��)��ݔ��ͬ�r��MPC860�l(f��)���Д���̖IRQ3��MPC860푑�(y��ng)�Д�є�(sh��)��(j��)�Ľ��վ��_�^(q��)�x������ring buffer�еȴ���(y��ng)�ó���̎�����䔵(sh��)��(j��)�l(f��)���^�̞飺MPC860���IP����b���≺�s����Z����(sh��)��(j��)�����ڙz�y���l(f��)�;��_�^(q��)���Õr��ݔ����SCC�l(f��)�;��_�^(q��)��ͨ�ſ������ṩ�l(f��)�͎�ͬ����̖�(q��)�Ӕ�(sh��)��(j��)��ݔ?sh��)�Tx FIFO(�l(f��)�;��_�^(q��))������Tx FIFO�M�rֹͣ�l(f��)�͎�ͬ����̖����(sh��)��(j��)�l(f��)�����CPM�����㣬TxBD)�е�Rλ��ʾMPC860����SCC�l(f��)�;��_�^(q��)���b���µĔ�(sh��)��(j��)�����´�ݔ����(zh��n)�䡣
����1��4 QMCͨ�Ņf(xi��)�h
������ͨ��������(QUICC Multichannel Controler��QMC)�Ǟ��ˌ��F(xi��n)�r�֏�(f��)�Ô�(sh��)��(j��)��ݔ���O(sh��)Ӌ�ģ������ѕr�֏�(f��)�Î��Ĕ�(sh��)��(j��)�ְl(f��)�����_(d��)64��߉ͨ����ԓģʽ�°�ÿһ���Ĕ�(sh��)��(j��)���ֳ����ɂ��r϶(Timeslots)��ÿ�r϶8 b���ڕr϶�������Ҏ(gu��)��ÿ�r϶��(sh��)��(j��)�Č���ij��ͨ����ÿ��ͨ������һ�M�ض��ľ��_�^(q��)������������(y��ng)�ľ��_�^(q��)��һ���r϶�Ĕ�(sh��)��(j��)���հl(f��)�r���������ض��ľ��_�^(q��)�MPC860T�Ϳɰѷ�ɢ�Ĕ�(sh��)��(j��)*��һ��l(f��)�ͣ����*��һ��Ĕ�(sh��)��(j��)�ְl(f��)�����Ԍ��õľ��_�^(q��)��������Ҫ�~���̎���^(q��)�ָ��N���ӵĔ�(sh��)��(j��)����
����2 BSP �O(sh��)Ӌ���F(xi��n)
�����O(sh��)Ӌ��ܛ���_�l(f��)��Ҫ�������Ӵ��a�ľ���������ϵ�y(t��ng)����ֲ��Ӳ���(q��)�ӳ�����Z��������a��IP���b������b��(y��ng)�ó���ƪ�����ޣ����ăH��BBSP��ֲ��BSP���弉֧�ְ����书�ܞ�Ӳ����ܛ����ʼ��������Ӱ������d���O(sh��)���(q��)�ӵȡ�
����2��1 BSP�Ķ���
�����oՓ��BootRom߀��VxWorks��Ҫʹ��BSP���a��BSP������Ҫ����(j��)Ӳ�����á�ϵ�y(t��ng)�O(sh��)Ӌ����ܛ�����ܵȌ��H��r�����H�_�l(f��)�^���У����˿s�̮a(ch��n)Ʒ�_�l(f��)���ڣ�ͨ����WINDRIVER��˾��BSPģ����ߵ�������˾�ṩ�Ŀɹ�������BSP����A(ch��)������(j��)ܛӲ�����w�����M(j��n)���ģ������µij����(q��)������Ӳ�����ܡ����n�}���Ȱ�APC860�_�l(f��)���BSPMPC860TEVB��ؐ��installdir����Tornado��target��collfig��ppcs860Ŀ��£���Ҫ�������ġ�
����2��1��1 config��h�ļ�
��������(j��)���H��r����Ҫ�Ć����У���(n��i)���ַ�����������ã��IJ��ִ��a���£�
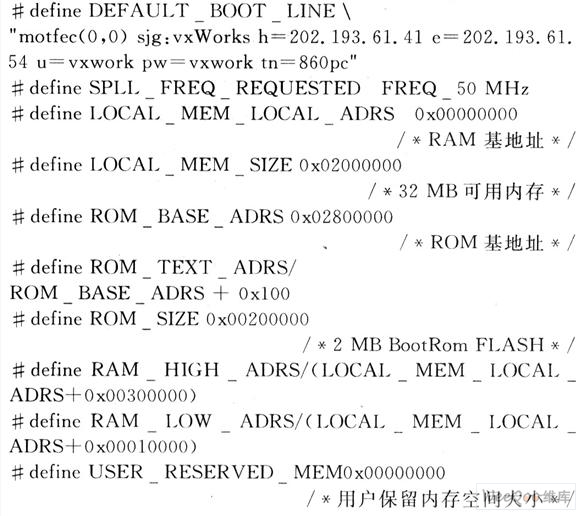
����2��1��2 makefile�ļ�����
����makefile�ļ����ģ����ֳ������£�
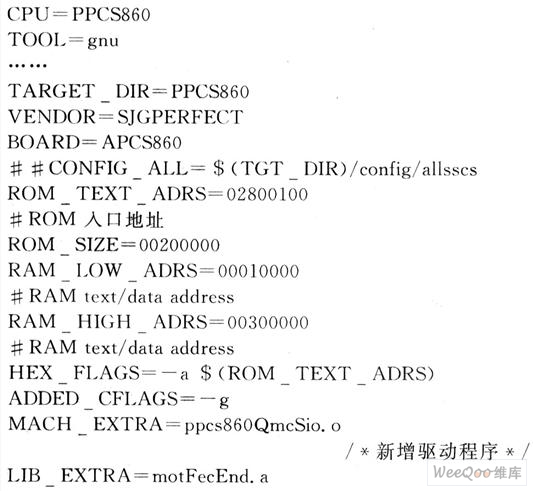
����2��1��3 romInit�ļ���
����romlnit��sģ�K������VxWorks��ROM�е�����cromlnit()�����džΰ�����Ժ����Ȉ�(zh��)�еąR��������a��ԓ����(sh��)���ܰ���̎�����ď�(f��)λ����(n��i)��ij�ʼ���Լ�������������ͱ�Ҫ�ij�ʼ����������Ҫ�ĵă�(n��i)�����£�
������(n��i)���惦��ӳ��Ĵ���IMMR��ԓ�Ĵ����Á��(bi��o)�R��(n��i)����ַ���g�Ļ�ַ����ԓ�Ĵ����O(sh��)�Þ顰FF000000����
����SIUģʽ���üĴ���SIUMCR���������ⲿ�����ٲ������ã��ⲿmaster��֧�֣�DEBUG�{(di��o)ԇ�˿����ã�ϵ�y(t��ng)�ӿ����_�����Լ���żУ�֧�֣���ԓ�Ĵ����O(sh��)�Þ顰00E10000����
����BSP��ӑՓSDRAM�ij�ʼ���^�̣����Ȍ�MAMR�Ĵ����ij�ʼ�����ٵõ�UPM��RAM��б��ĵ�ַ��Ȼ��RAM��б���ַ�е�ֵ����MPC860 RAM WORDS ARRAY�У�����ʼ��OR�Լ�BR�Ĵ�����
����2��1��4 ppcs860��h
����ppcs860��h�Dž���(sh��)�����^�ļ���ԓ�ļ����������궨�x����ʹMPC860T�����\����SCC���ڹ�����QMC�f(xi��)�h��ģʽ������(j��)���H��Ҫ�����������ã�
����(1)��ϵ�y(t��ng)��������(y��ng)�ĺ궨�x��SCCx����(sh��)���p�˿�RAM�д惦����ʼ��ַ�����_�^(q��)������(BD)�Ļ���ַ�����_�^(q��)��BD�Ĕ�(sh��)Ŀ�ȣ�
����(2)���ں͕r϶������ij�ʼ������Ҫ�����r϶���䡢���_����ȣ�ͨ�^�O(sh��)��SI RAM����(sh��)��Ҏ(gu��)����ÿ��߉ͨ������(y��ng)�ĕr϶�͔�(sh��)��(j��)·�ɣ���ϵ�y(t��ng)���x��SCC2��TDMB�ӿڌ��F(xi��n)QMCͨ�ţ����_�������£�
����PC6 RSYNC��PA2 RXC��PA10 RXD��PA0 TXC��PA11 TXD
����(3)SCC2��ʼ�����O(sh��)��SCC2������QMCģʽ��
����(4)QMCȫ�օ���(sh��)��ʼ����MCBASE(��ͨ������ַָ�)����ʼ����SCC2����(y��ng)�ⲿBD���Ļ���ַ��MRBLR(�����վ��_�^(q��)�L��)�����ա��l(f��)�͕r϶�������ʼ��ַ��ָ�(Rx S PTR��Tx S PTR)�����ա��l(f��)�͕r϶�������(d��ng)ǰ�r϶��ָ�(Rx PTR��TxPTR)���Д�ѭ�h(hu��n)������ַ(INTBASE)���Д�ѭ�h(hu��n)����һ������ڵ�ָ�(INTPTR)�ȣ�
����(5)QMC�ض�ͨ������(sh��)��ʼ����TBASE��RBASE(ԓ߉ͨ���ľ��_�^(q��)����������ʼ��ַ)��TBPTR��RBPTR(��(d��ng)ǰ�l(f��)�͡����վ��_�^(q��)������ָ�)��TMR-BLR(�����Վ��L��)�ȡ�
����2��1��5 �(q��)�ӳ���
�����(q��)�ӳ���ֱ�ӌ�Ӳ�����������F(xi��n)Ӳ���Ͳ���ϵ�y(t��ng)����(y��ng)�ó���֮�g�Ľ�������Ҫ���о���MPC860 SCC�����(q��)�ӳ���ppcs860QmcSio��c��ͨ��ƽ�_��SCC������QMC Transparentģʽ��ppcs860QmcSio��c�ļ��а���SIO_DRV_FUNCS�Y(ji��)��(g��u)�w�ж��x��5������(sh��)���Д�̎������(sh��)ppc860QmcInt()��Qmc߉ͨ����(f��)λ����(sh��)ppc860QmcChannelReset()��ppc860SccIoctl()�ṩ��һЩ�O(sh��)������x헣�����ֹͣ��(sh��)��(j��)���͡��쿴��(d��ng)ǰͨ�Š�B(t��i)(���e߀��æ)��݆ԃ���Д�ģʽ�x��ȣ�ppc860sccInt()̎��QMCͨ�����Д�Ո��ͨ�^�Дʽ���F(xi��n)��(sh��)��(j��)���հl(f��)���ܣ�ppc860SccStartuP()����(sh��)����һ���l(f��)�����ڣ�ppc860SccCallbackInstall()���b���{(di��o)����(sh��)���Д�̎������(sh��)�Ĺ����У�
����(1)�ṩ���ա��l(f��)���Д�̎������(sh��)���{(di��o)�û��{(di��o)����(sh��)����O(sh��)����^�ߌӅf(xi��)�h֮�g�Ĕ�(sh��)��(j��)���͡�
����(2)̎�픵(sh��)��(j��)�����^���г��F(xi��n)�Ľ��Ք�(sh��)��(j��)�^�L����(sh��)��(j��)���ͱ��ȽKֹ�Ȯ��������ڲ���ҪQMC��݆ԃģʽ�����ppc860SccPollInput()��ppc860SccPollOutput()��NULL����(sh��)����ʽ���F(xi��n)��ͬ�r߀Ҫ����sysSccSeri-al��c�ļ�����sysLib��c�ļ���usrConfig��c�ļ�����sysSccQmc��c���ṩSCC�O(sh��)���������ij�ʼ�����̡�SCC�Д��B�����̵ȣ�ͨ�^��sysLib��c��usrCon-fig��c�ļ��Ԍ��F(xi��n)VxWorks��QMC�(q��)�ӳ�����{(di��o)�ú�QMC�(q��)�ӳ����cTTYϵ�y(t��ng)�Ē�ӡ�
����2��1��6 ͨ���Д�̎���^��
������(sh��)��(j��)�հl(f��)�ĺ������Д�̎������(sh��)��QMC�е�����߉ͨ������SCC2���Д࣬SCC2�S����һ��ȫ���Д��������ÿһ����涼����߉ͨ��̖���Д�Դ�����Ա��(q��)���R�e��̎����ͬ��r�³��F(xi��n)���¼����Д�l(f��)���r���(q��)�ӏ�SCCE�Ĵ��������Д�ȫ���Д�Դ������Д�����߉ͨ�������Д����(w��)��������ȫ���Д�����ҵ�ԓ߉ͨ���������Д��lĿ����z���Д���Ϣ�Դ_����ʲô��ͣ����{(di��o)������(y��ng)���հl(f��)���e�`̎������(sh��)��
����2��1��7 ��(sh��)��(j��)���պͰl(f��)��
������ͨ���Z��ͨ��ϵ�y(t��ng)��MPC860T SCC���ڕr�֏�(f��)�ü�������QMCģʽ��߉ͨ����ͨ�Ņf(xi��)�h��Trasparent mode��ԓ�f(xi��)�h�H��ݔ���M(j��n)�Ɣ�(sh��)��(j��)��������(sh��)��(j��)���M(j��n)��λ�����������^(q��)��?j��n)?sh��)��(j��)���еĸ�ʽλ����ֹλ�͔�(sh��)��(j��)λ�ȣ��������յĔ�(sh��)��(j��)���z�e̎������������^�ߵĔ�(sh��)��(j��)��ݔ���ʡ�
�������պ���(sh��)���Д����(w��)�����{(di��o)�á�������ÿ����һ���a(ch��n)��һ���Д࣬�ʽ��պ���(sh��)Ҳÿ��̎��һ���Ĕ�(sh��)��(j��)����(sh��)��(j��)�Ľ����ɽ���������RxBD���ơ���(d��ng)Ҫ���Ք�(sh��)��(j��)�r�����պ���(sh��)������Ҫ�_��RxBD��Ч���_���]�І��}�Ō���(sh��)��(j��)�Ľ��վ��_�^(q��)��ؐ������Ring buffer������(f��)λRxBD����t���M(j��n)������(y��ng)�e�`̎�����(f��)λRxBD�����պ���(sh��)������D3��ʾ��
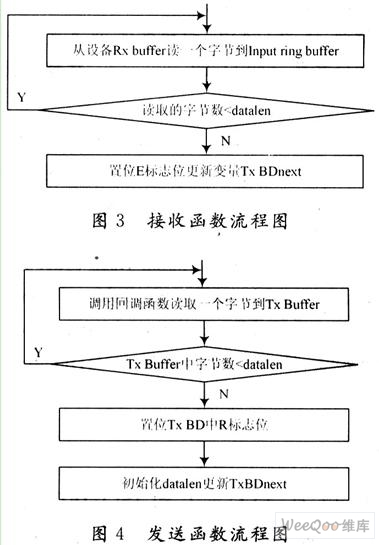
������(sh��)��(j��)�l(f��)�Ͳ��{(di��o)���Д�̎������(sh��)���l(f��)�ͺ���(sh��)�z�y���l(f��)�;��_�^(q��)����(��TxBD��Rλ��1)���{(di��o)�û��{(di��o)����(sh��)����(sh��)��(j��)�İl(f��)��Ring buffer��ؐ�����ڰl(f��)�;��_�^(q��)(Txbuffer)���@���l(f��)�����_������ĭh(hu��n)�ξ��_�^(q��)(�����ݼ{��(y��ng)�ó���ÿһ���Ĕ�(sh��)��(j��))���l(f��)�ͺ���(sh��)������D4��ʾ��
����2��2 BSP�{(di��o)ԇ�����������Ć��}
����2��2��1 �{(di��o)ԇ����
�����_�l(f��)�{(di��o)ԇ�ЃɷN������һ�N��ʹ��������ͨ�^BDM(����{(di��o)ԇģʽ)һ�����ظ�ۙ�{(di��o)ԇ����һ�N��ͨ�^�c���ķ�ʽ�M(j��n)�����^�ġ��ڡ��{(di��o)�����ڡ��{(di��o)�ķ�����ͨ�^�������W����ʾ�����yƬ�x�ȣ�����(j��)�ⲿ�F(xi��n)��������Ĝyԇ���a�M(j��n)�б��^�������{(di��o)ԇ�����M(j��n)�С��ڡ��{(di��o)��Ŀ�����{(di��o)ͨ�Ŵ��ڲ��ִ��a�������C(j��)����ͨ�^�����cĿ��(bi��o)�C(j��)��ͨ�ţ�Ȼ�����{(di��o)ԇ�������֡��{(di��o)ԇ���̷ֳɃɲ��֡��������A(y��)��(n��i)�ˆ��Ӵ��a(Pre-Kernel Initializa-tion)������С��(n��i)�ˆ���������������I��Oϵ�y(t��ng)���ļ�ϵ�y(t��ng)���W(w��ng)�j(lu��)ϵ�y(t��ng)�ȽM�����{(di��o)ԇ��(y��ng)�ó���ʹ�÷�����Vi-sion Probeͨ�^BDM��ʽ�{(di��o)ԇBSP����BootRomӳ�����FLASH��
����2��2��2 �{(di��o)ԇ�������Ć��}
����(1)ϵ�y(t��ng)�o��������(f��)λ
�������{(di��o)ԇ�^���У��l(f��)�F(xi��n)MPC860T��CLKOUT���_�oݔ����̖��ϵ�y(t��ng)��늏�(f��)λ�^�̛]����ɣ�ϵ�y(t��ng)�o�����������������Д���Ӳ�����}�����f�ñ���ʾ�����z����늏�(f��)λ��Ӳ����(f��)λ��ܛ����(f��)λ���r�ݔ���BDM�{(di��o)ԇ��ģ�K�·���l(f��)�F(xi��n)�������Д���BGA���ӳ��F(xi��n)���}����оƬȡ�£����º��ӣ�ϵ�y(t��ng)��(f��)λ�������r���̖ݔ����(w��n)��������
����(2)�W(w��ng)�j(lu��)�o���c���ͨ��
����100 Mb��s������̫�W(w��ng)�(q��)�Ӽ��d�У��W(w��ng)�j(lu��)�Ӆf(xi��)�h�o���\�У�Ŀ��(bi��o)��o���c���W(w��ng)�j(lu��)����(li��n)ϵ��Ŀ��(bi��o)��W(w��ng)�j(lu��)���ӕr�l(f��)����MAC��ַ��Ϣ�����o���յ���ͨ�^�������l(f��)�F(xi��n)����β��\����������(j��ng)�^����(f��)ԇ�͜yԇ����K�l(f��)�F(xi��n)��SDRAM��ʼ������]���\�Ќ�(d��o)�³����\��(��ҪSDRAM֧��ͻ�l(f��)ģʽ)���e�������{(di��o)ԇ��ʽ����BootRom�_ʼ�����г������FLASH����늆��ӣ��W(w��ng)�j(lu��)������Ŀ��(bi��o)���c��罨�����õľW(w��ng)�j(lu��)ͨ�š�
����3 �Y(ji��) �Z
����ԓϵ�y(t��ng)�ڌ��H�yԇ��Ԓ���|(zh��)����(w��n)�����yԇ�r���������]�д�?d��ng)_���s�����]���^�����t���f��Ӳ���O(sh��)Ӌ���_��䣬QMC�(q��)�ӳ�����Z������a��IP���b�c����b��(y��ng)�ó������܃�(y��u)����
��������忨���Z��ͨ�����࣬�tÿ���ĕr϶���ࡢ�L���������FPGA��(n��i)���·���ṩ�ĵĎ�ͬ����̖���ڲ�����׃������ֻ�nj��H��(sh��)��(j��)��ݔ������ߣ����Ա��C��·�Z����ͬ���͌��r�ԡ�ϵ�y(t��ng)��QMC������Transparent Mode���������đ�(y��ng)�÷�������θ��M(j��n)ʹϵ�y(t��ng)֧�ֶ�Nͨ�Ņf(xi��)�h����Ҫ�M(j��n)һ���о��Ć��}��
]]>1 ����
VxWorks����������WindRiver�Ƴ���һ�NǶ��ʽ��(qi��ng)���r����ϵ�y(t��ng),�����ڶ��΄�(w��)�{(di��o)�ȵķ�ʽ,���Թ����������O(sh��),�������ɸ���(j��)��(y��ng)�ó����������ϵ�y(t��ng)�M(j��n)�вü�,���̶ȵĉ��s���a,���F(xi��n)����ă�(y��u)����
Intelx86ϵ��̎������Ƕ��ʽ��(y��ng)��һ������PC104����ʽ���F(xi��n)��,PC104������PC/AT�����И�(bi��o)��(zh��n)������,����CPUģ�K߀��һЩ���صă�(y��u)�c���_�l(f��)���ڶ̡��M�õ͡��w�eС���ӯB�B�ӡ�����С��ģ�K�������_��������������(qi��ng),�������惦�ضȷ����������ɶȸ�,�ɿ��Ըߡ�
��PC/104�����O(sh��)����ʹ�õĔ�(sh��)��(j��)�惦�O(sh��)��ͨ����Ӳ�P�ͻ����W�漼�g(sh��)�Ĺ̑B(t��i)��ӱP������Ƕ��ʽϵ�y(t��ng)�����h(hu��n)��һ����^����,Ӳ�P�ڐ��ӵ����ӗl���o����������,���̑B(t��i)��ӱP�Ĺ��������܌�,�����x������(y��ng)�h(hu��n)���µ�����(����40��������85��),�����w�e��С,�m��Ƕ��ʽ��(y��ng)�á���Ƕ��ʽϵ�y(t��ng)�Д�(sh��)��(j��)�惦�O(sh��)�������CE��˾��CF(CompactFlash)��,���ڴ�ܛӲ��ƽ�_���O(sh��)Ӌ�_�l(f��)��Ƕ��ʽ���r����ϵ�y(t��ng)VxWorks�IJ�����PC104�����İ��d֧�ְ���
]]>
-
ϵ�y(t��ng)image������,image�ķN�,image��download���d�^��,ϵ�y(t��ng)�Ć��������^��,�{(di��o)ԇ�h(hu��n)�������ü��h(yu��n)���{(di��o)ԇ�ķ�ʽ�ͷ���,����(y��ng)BSP�O(sh��)���ļ�����(�W(w��ng)�j(lu��),����..),BSP���ļ��ĽM�ɺ�����.
-
Ҫ��ϵ�y(t��ng)���(q��)�����,Ҳ���nj�CPU�����P(gu��n)��Ӳ�������˽�.��Ҫ��32̎����(��늆����^��, download image�ķ�ʽ����,�x��ROM,��ַ���g����,MMU,�Ĵ���,�Дඨ�x,..).����Ӳ���Y��,���xһЩԴ�a����������.
Tornado 2 �_�l(f��)�{(di��o)ԇ�h(hu��n)���f(xi��)�h��D
���C(j��)�_�l(f��)(Host Development System)
Ŀ��(bi��o)�C(j��)(Target System)Tornado ����
��
WTX�f(xi��)�hͨ��<==========>
Target Server
|
WDB�f(xi��)�hͨ��
<==========>
�ɂ���Ҫ�ɂ��f(xi��)�h
WTX�f(xi��)�h(Wind River Tool eXchange): �����_�l(f��)�C(j��)��(n��i)��Tornado�����cTarget Server֮�gͨ��.
WDB�f(xi��)�h(Wind DeBug): �������C(j��)Target Server�cĿ��(bi��o)�C(j��)֮�g��ͨ��.
��
һ.��������
BSP���x:
Provides VxWorks with primary interface to hardware environment.
����:
��ͨ늺�,��ʼ��Ӳ��.
֧��VxWorks��Ӳ���(q��)��ͨ��.
ʹhardware-dependent �� hardware-independent��VxWorksϵ�y(t��ng)�кܺõĽY(ji��)��.
��ҪBSP��Ҫ�ļ�Ŀ䛵ĽM�ɼ���Ҫ�ļ�������:
Ŀ�target/config/All:
�@��Ŀ��µ��ļ�
������BSP�ļ�������,�����e��Ҫ��Ҫ����������κ��ļ�.
configAll.h:
ȱʡ���x������VxWorks���O(sh��)��.�������ȱʡ���O(sh��)��,����BSPĿ��µ�config.h�ļ�����#define��#undef��ʽ�������O(sh��)��.
bootInit.c:
��romInit.s��,���Boot ROM�ĵڶ�����ʼ��.�����romInit.s�е�romInit()�����@���ļ��е�romStart().���(zh��)�б�Ҫ�Ľ≺��ROM image�ķ���.
bootConfig.c: ���Boot ROM image�ij�ʼ���Ϳ���.
usrConfig.c: VxWorks image�ij�ʼ�����a.
-
Ŀ�target/config/comps/src:
�漰ϵ�y(t��ng)���ĵ�components,��Ҫ��target/config/All��usrConfig.c�к���(sh��)�{(di��o)��
Ŀ�target/config/bspname:
����ϵ�y(t��ng)��Ӳ�����P(gu��n)��BSP�ļ�.
Makefile
һЩ�����п���images������,��Ҋ BSP�O(sh��)�ò��ּ��������d
README
BSP�l(f��)���o(j��)�,�汾,�����ęn
config.h
���������漰CPU������O(sh��)�ü����x(includes,definations),��Ҋ BSP�O(sh��)���ļ����������d
configNet.h
�W(w��ng)�j(lu��)�(q��)�ӵ���Ҫ�O(sh��)���ļ�,��Ҫ��END�(q��)���O(sh��)��.
romInit.s
�R���Z���ļ�,��VxWorks Boot ROM��ROM based image�����,��Ҋ ϵ�y(t��ng)���Ӳ���
sysALib.s
�R���Z���ļ�,����T�����Լ��ąR������(sh��)�����@���ļ���,���ό��{(di��o)��.VxWorks image������c_sysInit���@���ļ���,����RAM�Ј�(zh��)�еĵ�һ������(sh��).
sysLib.c
����һЩϵ�y(t��ng)���P(gu��n)�ĺ���(sh��)����,�ṩ��һ��board-level�Ľӿ�,VxWorks�͑�(y��ng)�ó��������system-indepent�ķ�ʽ����.�@���ļ�߀�ܰ���Ŀ�target/config/comps/src���(q��)��.
sysScsi.c
���x�ļ�����Scsi�O(sh��)���O(sh��)�úͳ�ʼ��.
sysSerial.c
���x�ļ��������еĴ����O(sh��)�úͳ�ʼ��.
bootrom.hex
ASIC�ļ�����VxWorks Boot ROM���a
VxWorks
�\����Ŀ��(bi��o)�C(j��)��,������,�B�Y(ji��)���VxWorks���M(j��n)���ļ�.
VxWorks.sym
��ȫ��,�B�Y(ji��)���з�̖����VxWorks���M(j��n)���ļ�
VxWorks.st
��ȫ��,�B�Y(ji��)��,standalone,���з�̖����VxWorks���M(j��n)���ļ�
��
BSP��"make"�����g�B������(Created),��������Tornado����.
BSP�͑�(y��ng)�ó�������"make"��"tornade"���_�l(f��)(developed)
BSP���O(sh��)�������(q��)��:
�Д����interrupt controller,Ӌ�r��timer(sys/aux),����UART(serial),�@ʾ��LCD,�I�PKeyboard(opt),�|����touch-screen(opt).
ǰ��������BSP����Ҫ����.
BSPĬ�J(r��n)��download VxWorks RAM image��ʽ�Ǐ�ethernet.
������|��Ҫ�Á����_�l(f��)��(COM1)ͨ��,ͨ�^�f(xi��)�hWDB.
VxWorks Image�ķN�:
Loadable images.
ROM-based images---compressed/uncompressed.
]]>